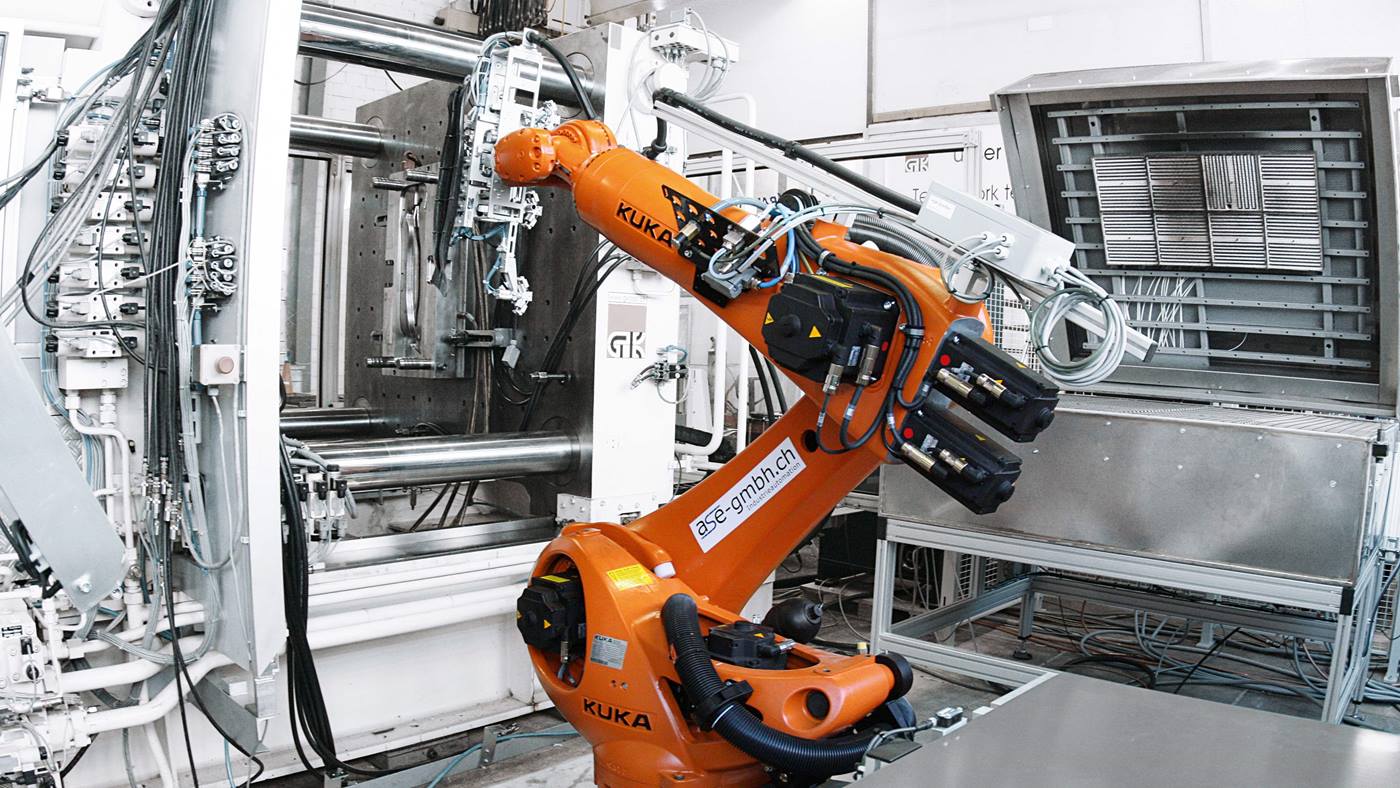
로봇을 이용한 핸들링
당사 핸들링 로봇, 적합한 소프트웨어 패키지 및 포괄적 서비스를 통해 당사에서는 거의 모든 산업에 최적화된 맞춤식 로봇 지원 핸들링 솔루션을 공급하고 있습니다: 조립에서부터 Pick&Place를 거쳐 재료 운반에 이르기까지.
자동화된 핸들링은 엄청난 이점을 제공합니다
당사의 포괄적 로봇 포트폴리오를 이용해 다양한 제품의 핸들링 공정을 자동화할 수 있습니다. 이 과정에서 최대 1.3톤의 가반하중을 자랑하는 당사 핸들링 로봇은 생산 현장의 귀사 직원들의 부담을 덜어주고 귀사의 경제성을 극대화하기 위한 다양한 분야에 사용할 수 있습니다. 이외에도 당사에서는 시스템 파트너 네트워크 및 글로벌 서포트를 통해 고객 요구에 부합하는 서비스도 제공하고 있습니다. 귀사 시스템의 플래닝에서 시운전에 이르는 포괄적 서비스로 KUKA를 통한 자동화의 모든 이익을 누리시기 바랍니다:
-

강력한 로봇 포트폴리오
-

최고의 유연성
-

연결성
-

더 낮은 에너지 소비율









KUKA 리니어 유닛을 적용할 경우 동작 자유도를 확장할 수 있으며 이로써 작업 반경을 현저하게 연장할 수 있습니다. 대형 로봇(KR C5) 및 소형 로봇(KR C5 micro)에 사용되는 컨트롤러는 정교한 동작을 완벽하게 제어합니다.

엄격한 요건이 적용되는 산업 분야를 위한 핸들링 로봇
핸들링 공법에 대한 오랜 노하우
당사에서는 귀사 생산 현장에 최적화된 다양한 핸들링 방식에 적용할 수 있는 다양한 자동화 솔루션을 보유하고 있습니다. Bin Picking에서 팔레타이징을 거쳐 운반에 이르기까지:
재료 운반
제조 공정에서는 A 지점에서 B 지점으로의 원활하고 빠르고 효율적 제품 운반이 핵심 요소로 작용합니다. 무인 운반 차량에서 모바일 로봇 및 내비게이션 시스템에 이르기까지 원활한 운반 프로세스에 필요한 모든 컴포넌트를 선택할 수 있습니다.

Bin Picking
BinPicking(박스 안으로 그리핑)에서는 구조화된, 반구조화된 또는 임의 산재 형태의 개체가 파지되고 원하는 하적 위치에 내려집니다. 이를 위해 로봇에는 정밀 비전 시스템이 필요합니다. KUKA에서는 예를 들어 KUKA.SmartBinPicking과 같은 우수한 신뢰성의 개체 인식용 소프트웨어 옵션을 공급하고 있습니다. 이 소프트웨어는 예를 들어 생산 현장에서 모든 종류의 벌크재에 대한 원활한 핸들링을 보장합니다.
Pick & Place
Pick&Place에서는 부품이 파지되고 원하는 위치에 배치됩니다. 이 공정은 제조 현장에서 가장 빈번하게 사용되는 프로세스 중 하나입니다. 피킹 & 패킹 작업에 최적화된 인텔리전트 소프트웨어 KUKA.PickControl과 당사의 폭넓은 로봇 포트폴리오의 조합을 통해 이 적용 분야의 효율성을 현저하게 개선할 수 있습니다.
팔레타이징
자동화된 팔레타이징에는 팔레트에서의 제품 정렬이 포함되는데, 이 과정은 용이한 운반성 및 제품의 번들화에 사용할 수도 있습니다. KUKA에서는 다양한 팔레타이징 방식을 제공합니다: 단일 팔레타이징, 혼합 팔레타이징, 디팔레타이징 및 냉동창고 팔레타이징.
당사 소프트웨어 KUKA.PalletTech는 단일 팔레타이징에 초점을 맞춘 우수한 가성비의 팔레타이징 솔루션을 제공합니다.
포장
포장은 환경으로부터 보호하기 위해 제품을 감싸는 패널에 해당합니다. 당사에서는 이런 용도에 사용되는 복수의 로봇을 공급하고 있습니다. 당사의 톱 모델로 KR QUANTEC을 들 수 있는데, 여기에는 골판지를 정확하게 접을 수 있는 접이식 진공 그리퍼를 탑재할 수 있으며 절단된 골판지를 접고 접착하는 용도로 주로 사용되는 Cobot LBR iiwa와 조합할 수 있습니다.
연결
기계와 시스템 사이의 작업 절차를 효율적으로 연결하기 위해 KUKA에서는 포괄적인 리니어 로봇 및 리니어 유닛 포트폴리오를 공급하고 있습니다. 공작기계, 후처리 시스템 또는 사출성형기 사이의 자동 연결은 생산 현장의 최대 유연성을 보장합니다. 당사의 무인 운반시스템은 자동화를 완성하는 요소로 작용합니다.
머신 로딩 및 언로딩
단조롭고 반복적인 육체적 노동에 해당하는 머신 로딩 작업은 당사 로봇을 통해 최적으로 자동화할 수 있습니다. 이 과정에서 당사 로봇은 기계에 부품을 삽입하거나 꺼내는 작업, 제로 클램핑 시스템을 통한 팔레트 핸들링 및 기계 도어의 열기 및 닫기 작업을 수행할 수 있습니다. 이를 통해 CNC 공작기계의 자동 제어도 가능합니다. 로봇을 통한 툴 핸들링에서는 기계에서 직접 툴을 교체하거나 또는 내부 툴 체인저를 통해 교환할 수 있습니다.
조립
조립 산업에서는 생산 및 조립 현장에서 핵심적 과제를 처리합니다. 당사 로봇으로 제품 핸들링, 품질 관리뿐 아니라 조립 단계 사이에서 필요한 핸들링 과제도 자동화할 수 있습니다. LBR iiwa 및 Cobot LBR iisy와 같은 협업 로봇은 보호 펜스 없는 안전한 작업을 보장합니다(인간-로봇 협업, HRC).
모든 핸들링 작업을 위한 소프트웨어 옵션
- KUKA.SmartBinPicking: AI 기반 부품 인식 및 로봇의 정확한 경로 계획
- KUKA.VisionTech: 구조화되지 않은 환경에서 2D 개체 인식 및 품질 관리를 위한 영상 처리 소프트웨어
- KUKA.PickControl: 복수의 컨베이어 벨트에서 산재한 정렬되지 않은 부품의 자동 픽킹 및 플레이싱
- KUKA.ConveyorTech: 컨베이어 벨트상에서 로봇 동작과의 연동을 보장합니다
- KUKA.PalletTech: 다양한 포장 패턴 및 스테이션으로 팔레타이징 과제의 컨피규레이션 및 수행
- KUKA.Sim: 오프라인 프로그래밍, 로봇 시뮬레이션 및 가상 시운전을 위한 시뮬레이션 소프트웨어
- KUKA iiQoT: 데이터 기반 자동화를 통한 로봇 시스템의 실시간 모니터링, 시각화 및 문제 해결
- KUKA.PLC mxAutomation: 외부 컨트롤러를 통한 산업용 로봇의 용이한 제어에 사용되는 소프트웨어 패키지
- KUKA ready2_pilot: 로봇의 간단한 수동 티칭 및 가이딩을 위한 직관적 컨트롤 패키지
로봇 기반 핸들링에 관련된 서비스 및 제품 정보에 대한 7일 24시간 접근성
디지털 고객 포털 my.KUKA에서 고객들은 언제든지 제품 데이터 및 제품 가용성을 조회하고, 하드웨어 및 소프트웨어 제품을 주문하거나 라이센스 및 지원 요청의 관리와 같은 다양한 업무를 수행할 수 있습니다.