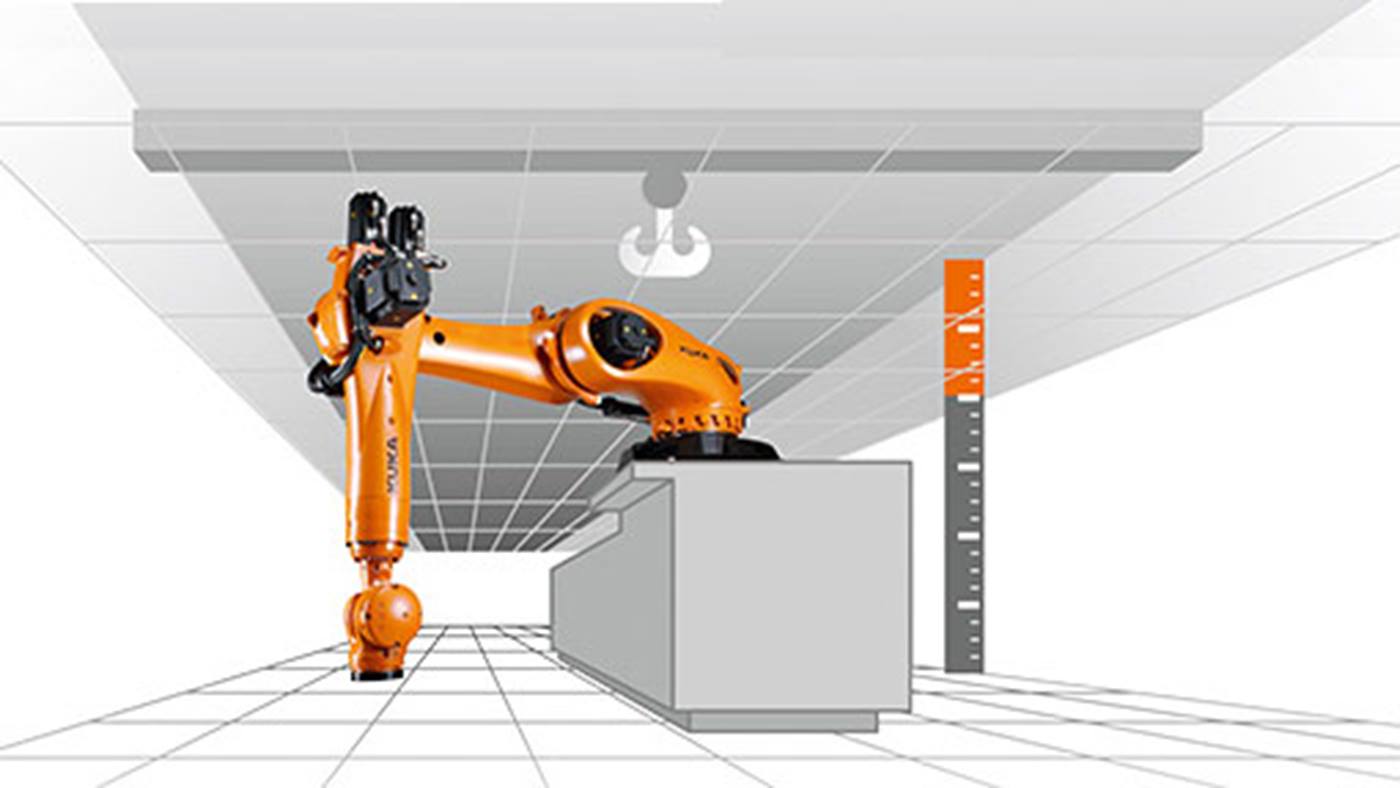

공작기계 및 로봇: 가장 빈번한 어플리케이션 영역
- 공작물의 핸들링:
로봇은 공작물을 공작기계에 공급하고 가공 후에는 이것을 다시 제거합니다.
- 공작물의 팔레타이징:
단 하나의 배치 사이즈까지 로봇을 이용해 표준화된 컨테이너에 다양한 공작물을 적재할 수 있습니다.
- 기계의 링킹:
로봇을 이용해 복수의 작업 단계를 연결할 수 있습니다. 하나의 소스에서 복수의 기계로 또는 다양한 소스에서 하나의 기계로 공작물을 공급합니다.
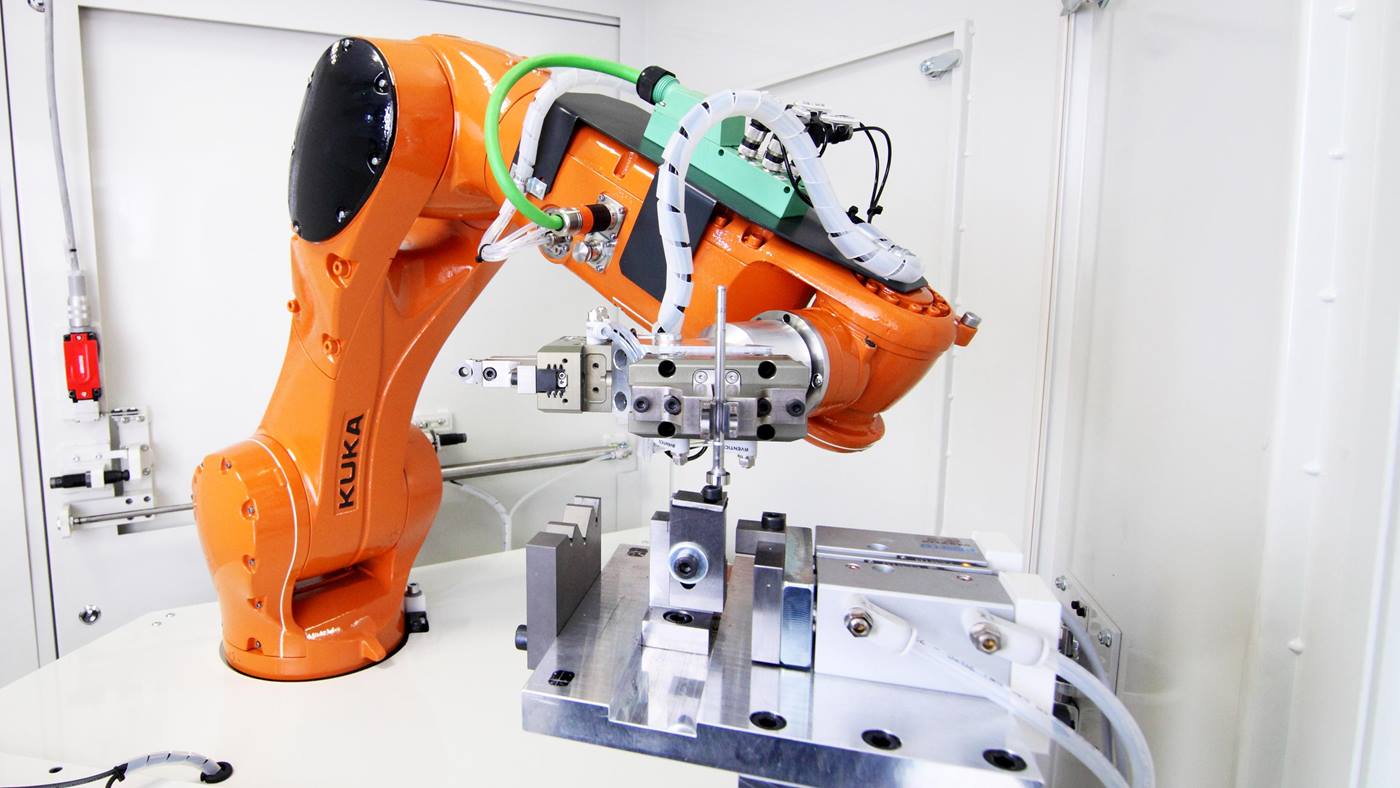
- 공작물의 가공:
로봇은 공작기계에서 단순한 가공단계를 줄이고 이런 방식으로 기계의 생산성을 제고할 수 있습니다. 이외에도 브러싱 또는 디버링과 같은 단순한 가공단계에서 작업자를 해방시키고 힘든 작업을 수행할 수 있습니다.
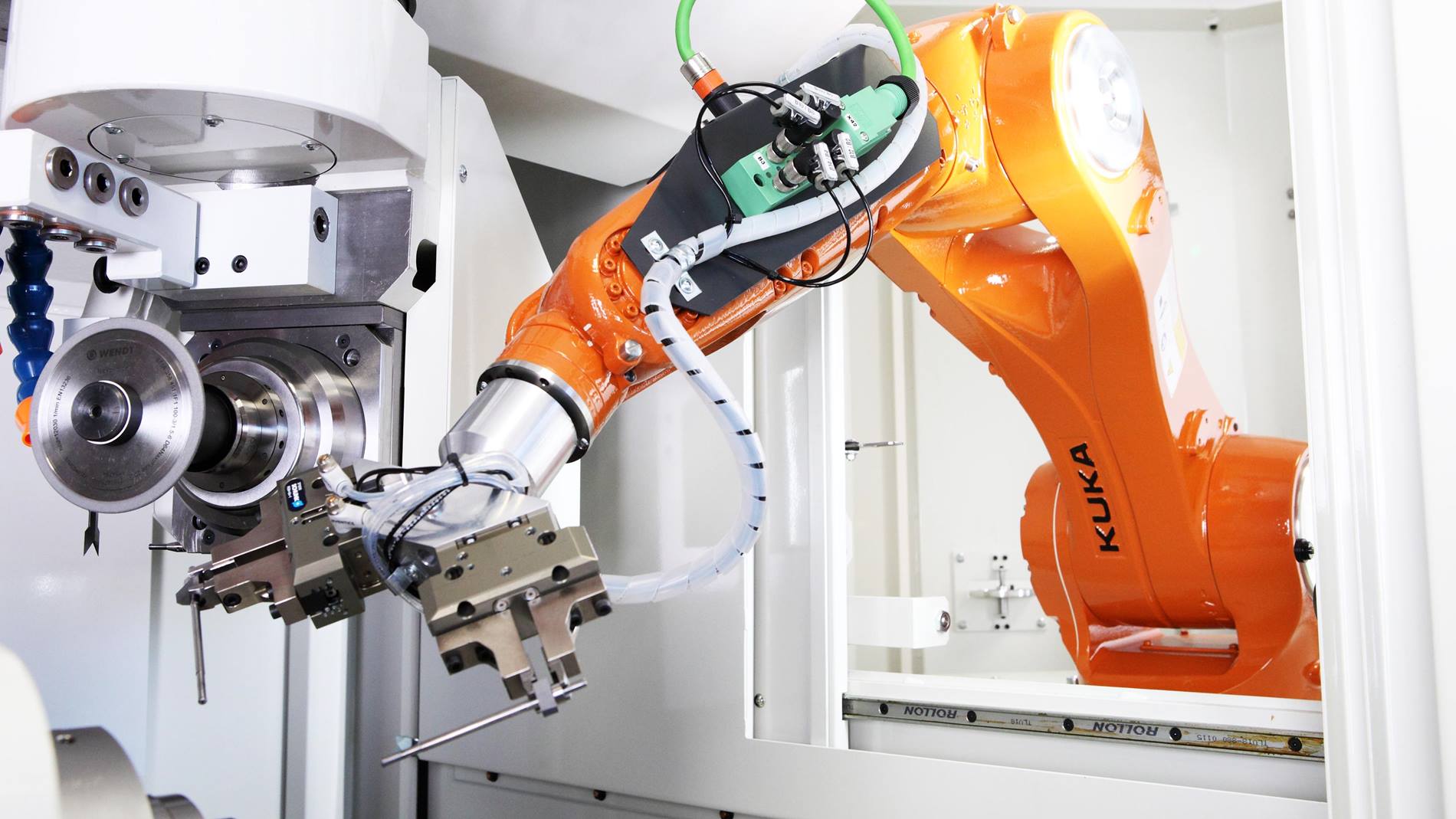
- 툴 핸들링:
로봇을 통해 기계에서 직접 툴을 교환하거나 또는 내부 툴 교환기를 통해 교환할 수 있습니다. 툴의 수는 오로지 로봇의 작업반경에 의해서만 제한됩니다. 리니어 유닛의 사용을 통해 로봇의 작업반경을 임의로 확대할 수 있으므로, 복수의 공작기계도 하나의 로봇으로 처리가 가능합니다.