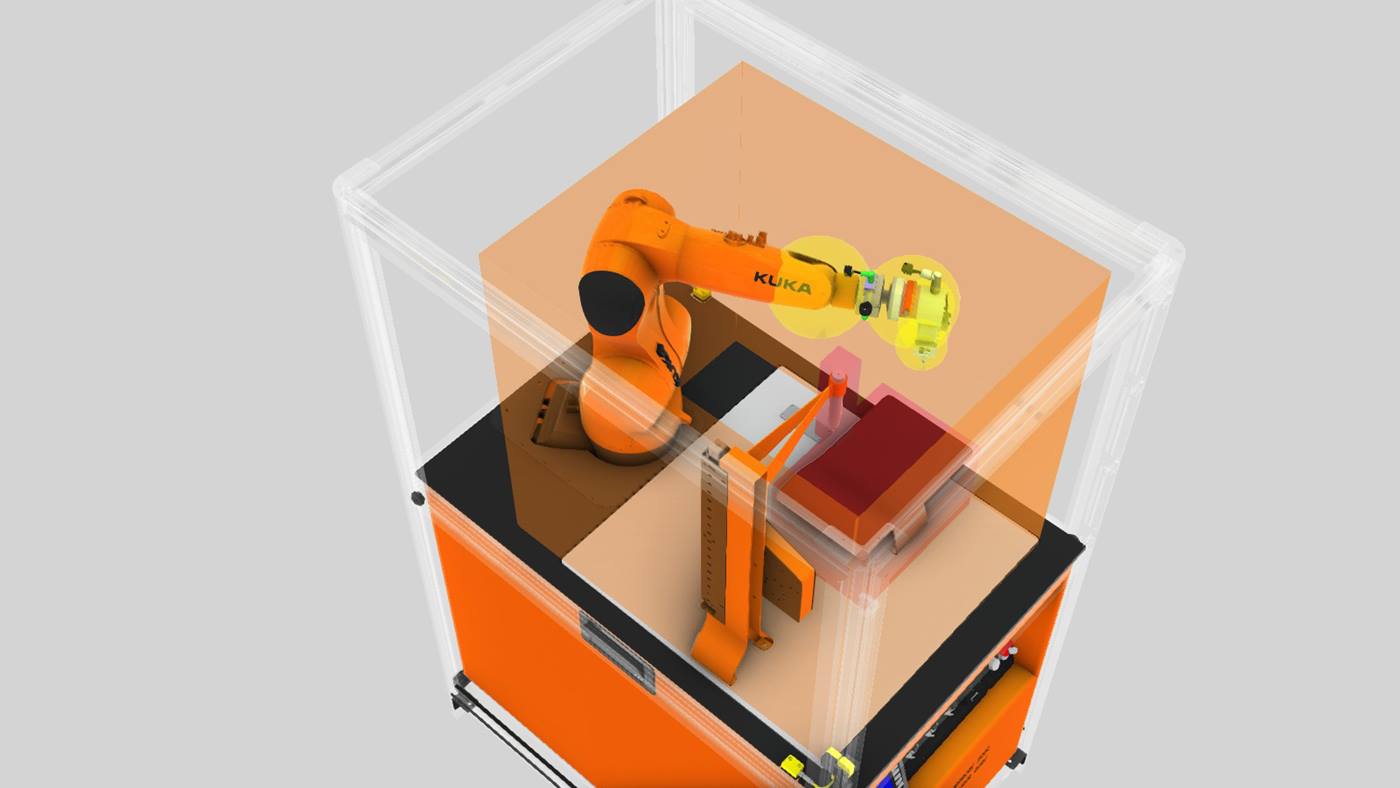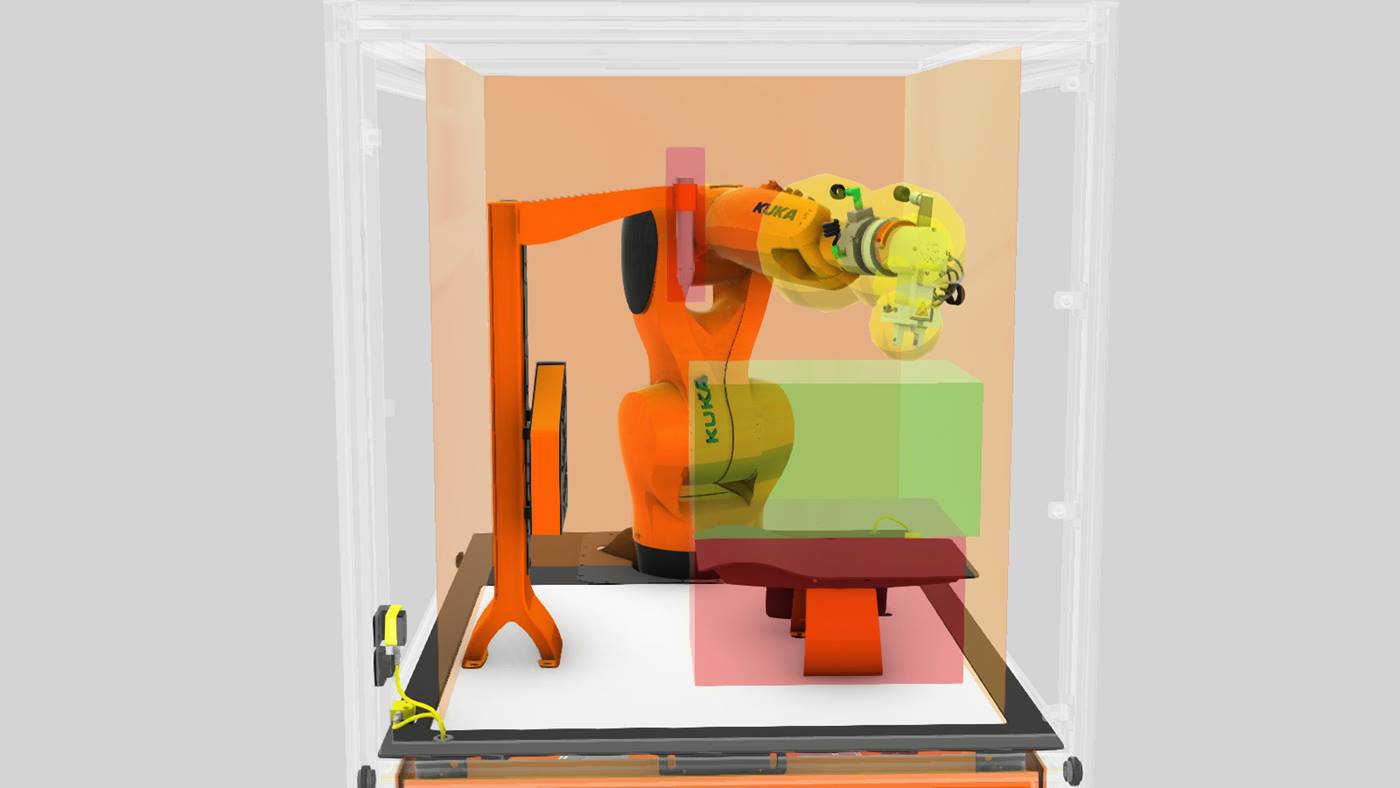
KUKA.SafeOperation을 적용한 모니터링 공간
초점은 바로 안전입니다. 소프트웨어는 이론적 작업 공간을 안전하게 축소하기 위해 최대 16개의 모니터링 공간과 한 개의 고정 셀 영역을 제공합니다. 이러한 모니터링 공간의 정의는 로봇의 동작을 결정합니다.
모든 영역을 개별적으로 결정할 수 있습니다. 직교 좌표 정의 또는 축별 정의 중에서 선택하십시오. 또한, 이러한 공간 유형은 다음으로 구분됩니다.
- 작업 공간
- 보호 공간
- 알람 보호 공간(정지하지 않음)
- 알람 작업 공간(정지하지 않음)
- 셀 영역(전환 불가능)