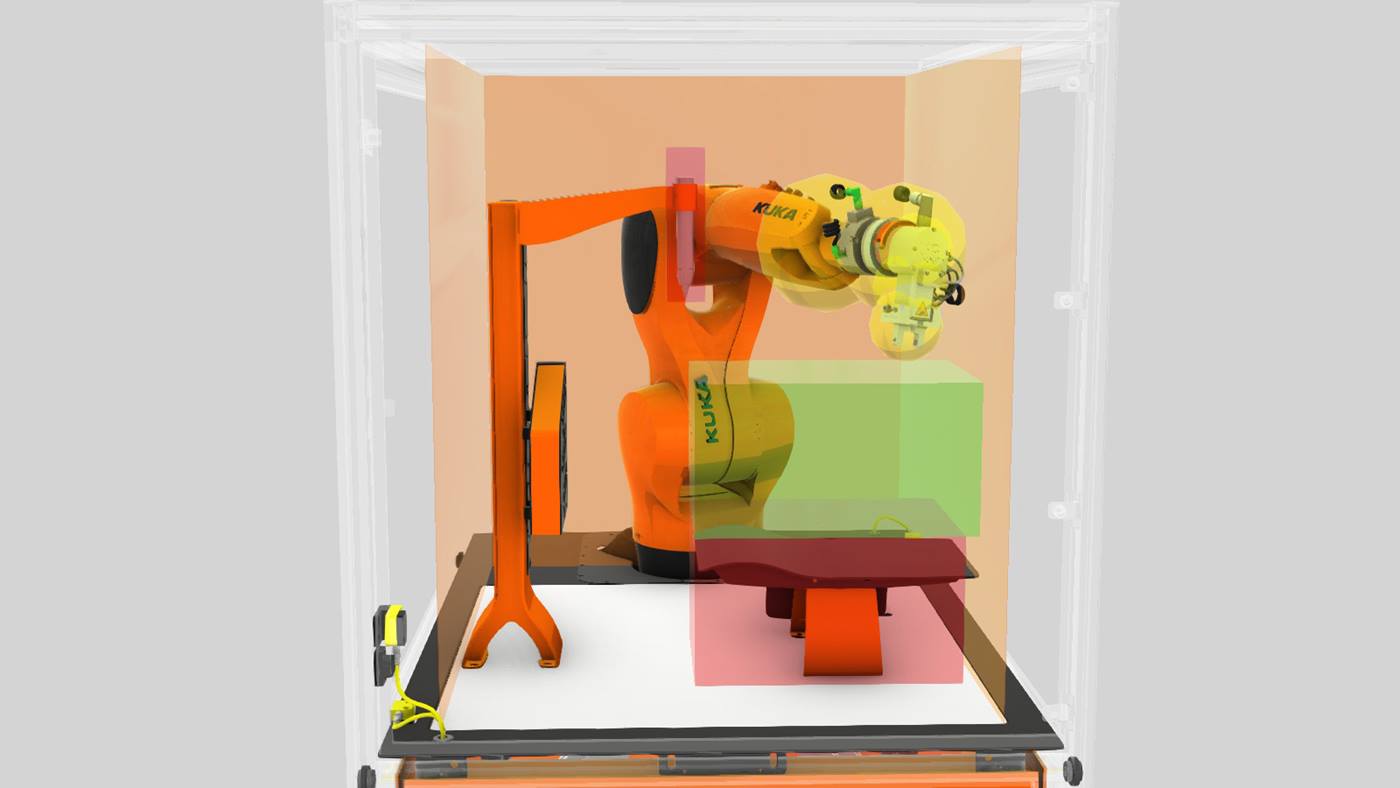
带 KUKA.SafeOperation 的监控空间
重点是安全。为了安全减少理论工作空间,该软件提供多达 16 个监控空间和一个固定的单元区域——这些监控空间的定义决定了机器人的动作。
各个区域都可以单独规定。请在笛卡尔定义或轴相关定义之间选择。对此应在这些空间类型之间进行区分:
- 工作空间
- 保护空间
- 信号保护空间(不停)
- 信号工作空间(不停)
- 单元区域(不可开关)

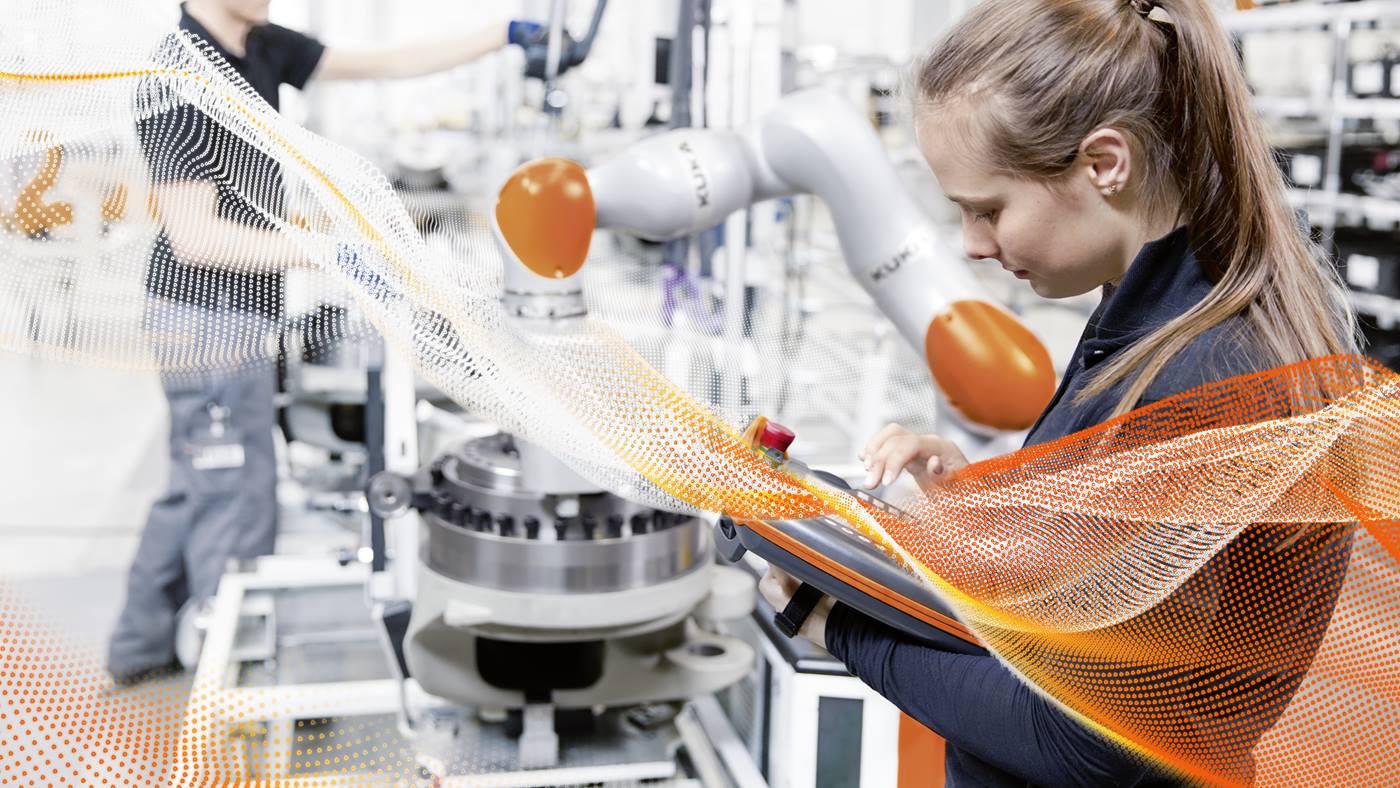
您可以用 KUKA.SafeOperation 减小您设备的空间需求,并快速、安全和紧凑地生产。它们向您提供成本更低地利用工作单元配置选项和人机合作的新机会。
重点是安全。为了安全减少理论工作空间,该软件提供多达 16 个监控空间和一个固定的单元区域——这些监控空间的定义决定了机器人的动作。
各个区域都可以单独规定。请在笛卡尔定义或轴相关定义之间选择。对此应在这些空间类型之间进行区分:
这些功能由以太网安全接口(ProfiSafe、CIP-Safety、FSoE)支持。此外,KUKA 为不够多的配置提供分离式安全接口 X11/X13 Safe Operation。
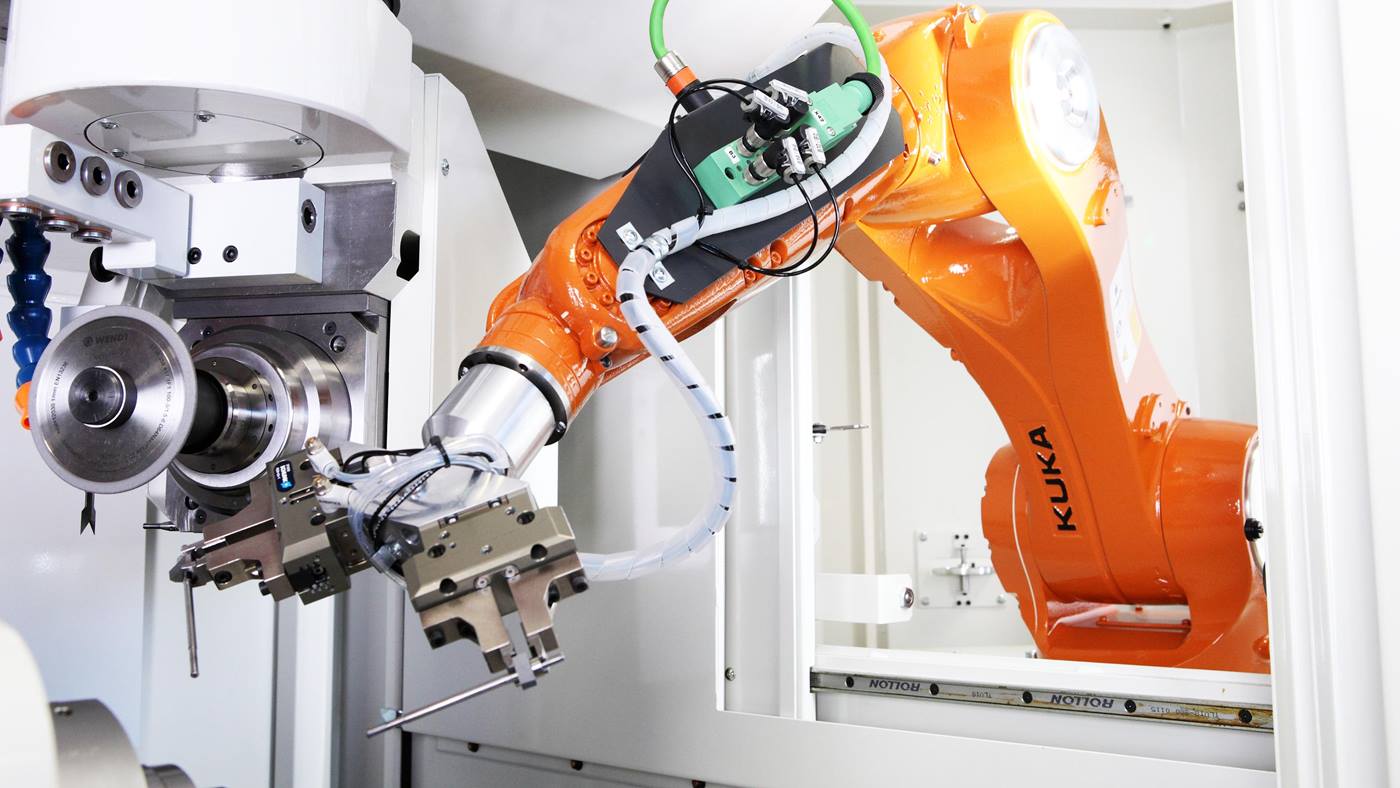
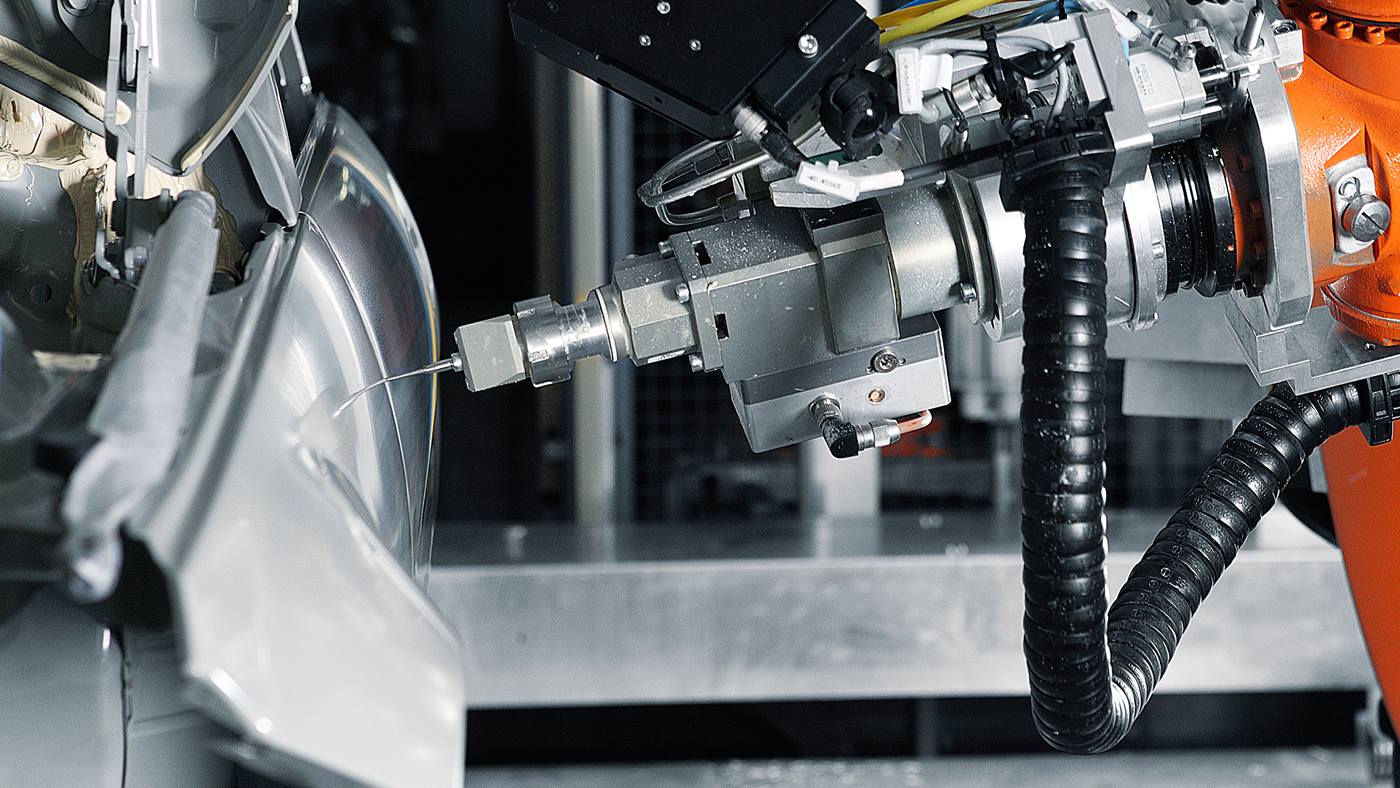
KUKA.SafeOperation 软件用在不同的应用中,例如用于干冰喷射或粘贴。
单元区域定义了单元内安全护栏的位置:
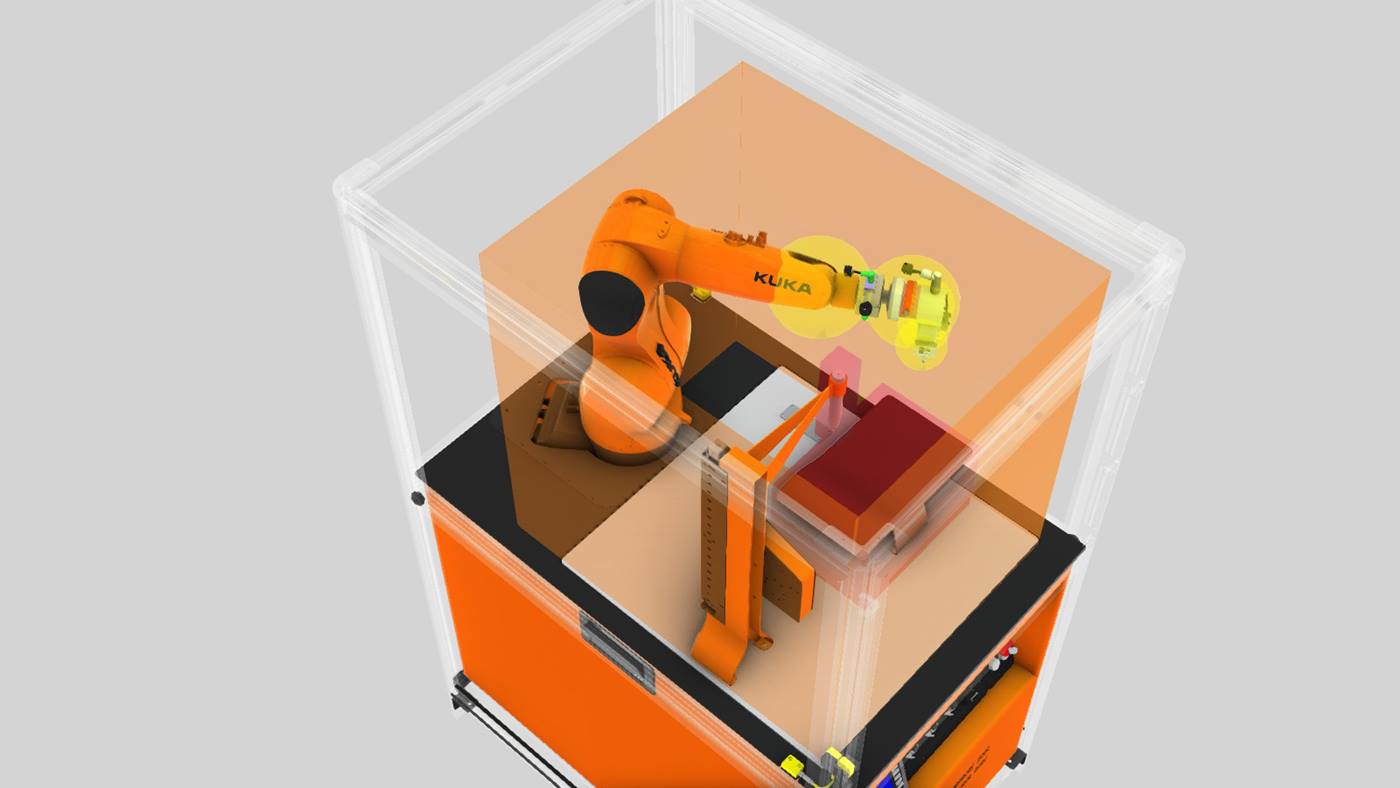
用 KUKA.SafeOperation 软件通过已配置的工作或防护区域减少机器人的理论工作空间。
您获得的好处:您减少设备的占地面积。防护设施限定在已经减少的实际区域上。