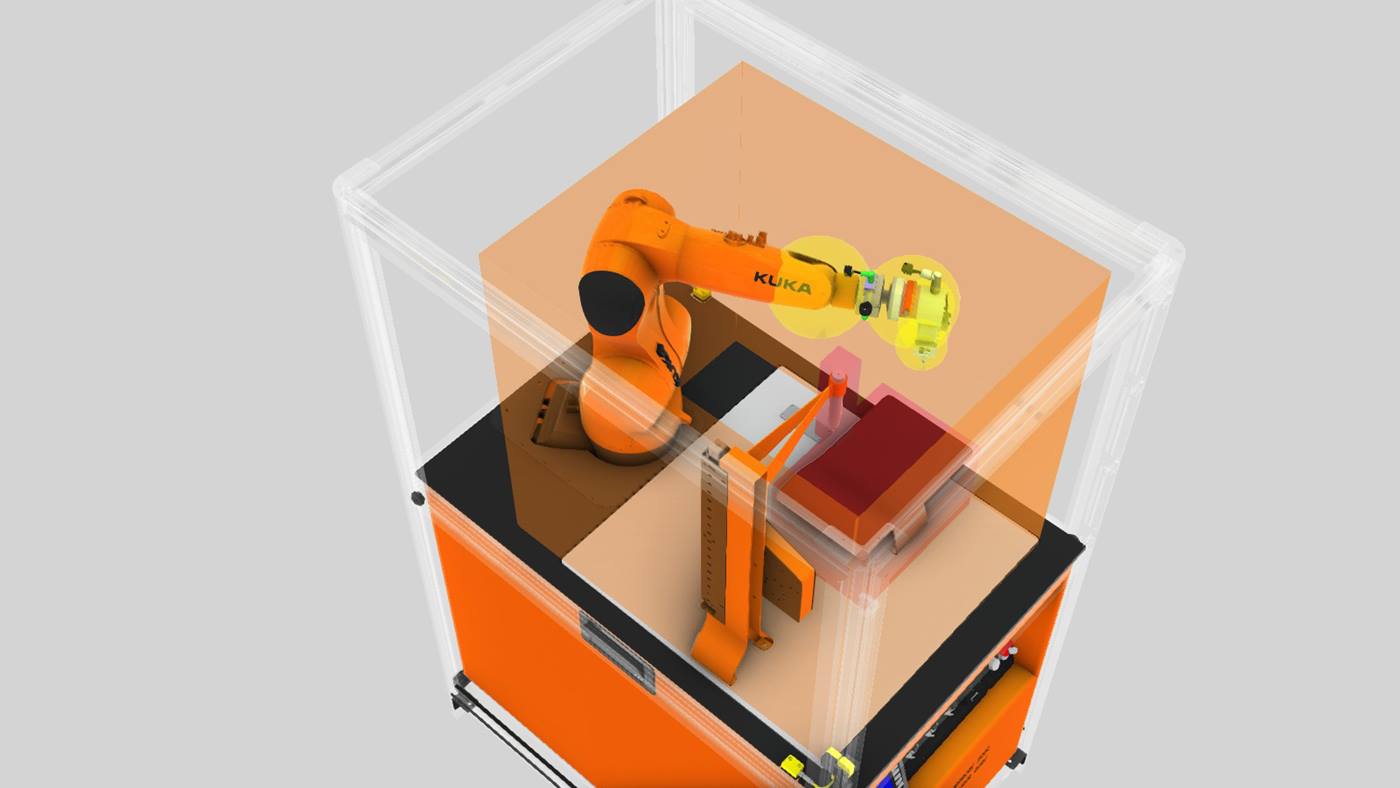
Monitoring spaces with KUKA.SafeOperation
The emphasis is on safety. The software package provides up to 16 monitoring spaces and a fixed cell area for safe reduction of the theoretical workspace – the definition of these monitoring spaces determines the response of the robot.
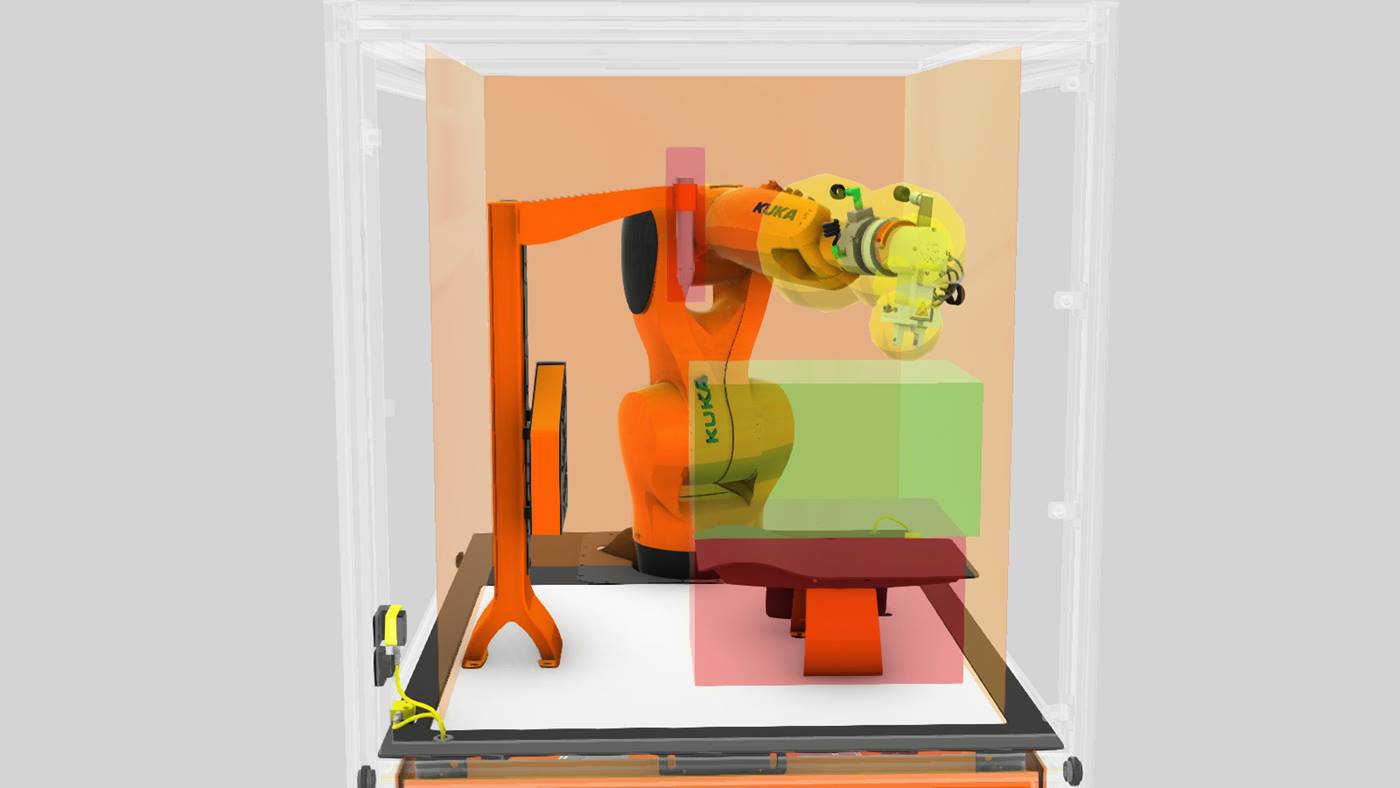
Each area can be defined individually. Choose between Cartesian and axis-specific definition. A further distinction is made between these types of space:
- Workspace
- Protected space
- Alarm protected space (non-stopping)
- Alarm workspace (non-stopping)
- Cell area (non-switchable)