아직 초기 단계에 있는 기계 로딩의 자동화
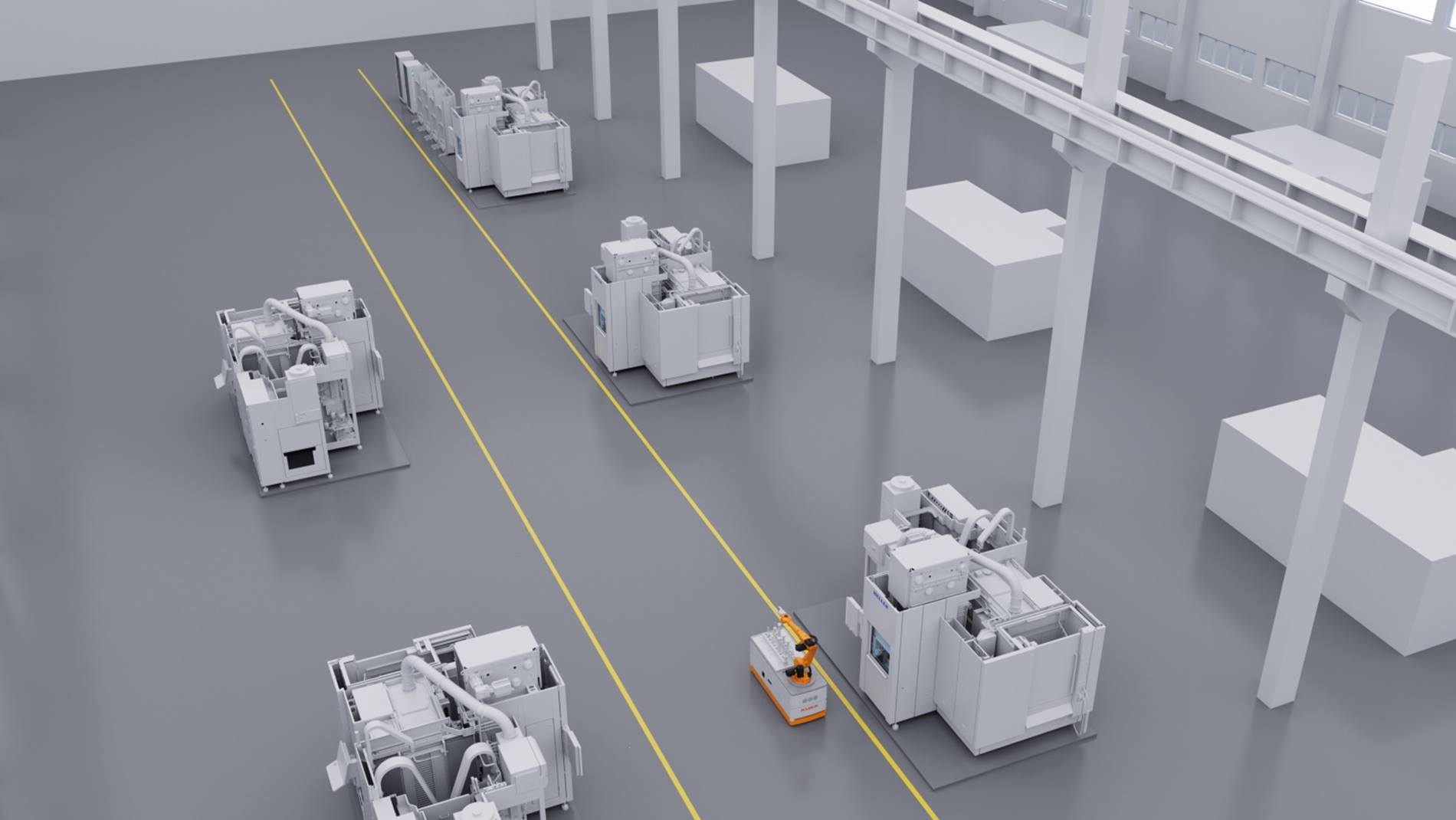
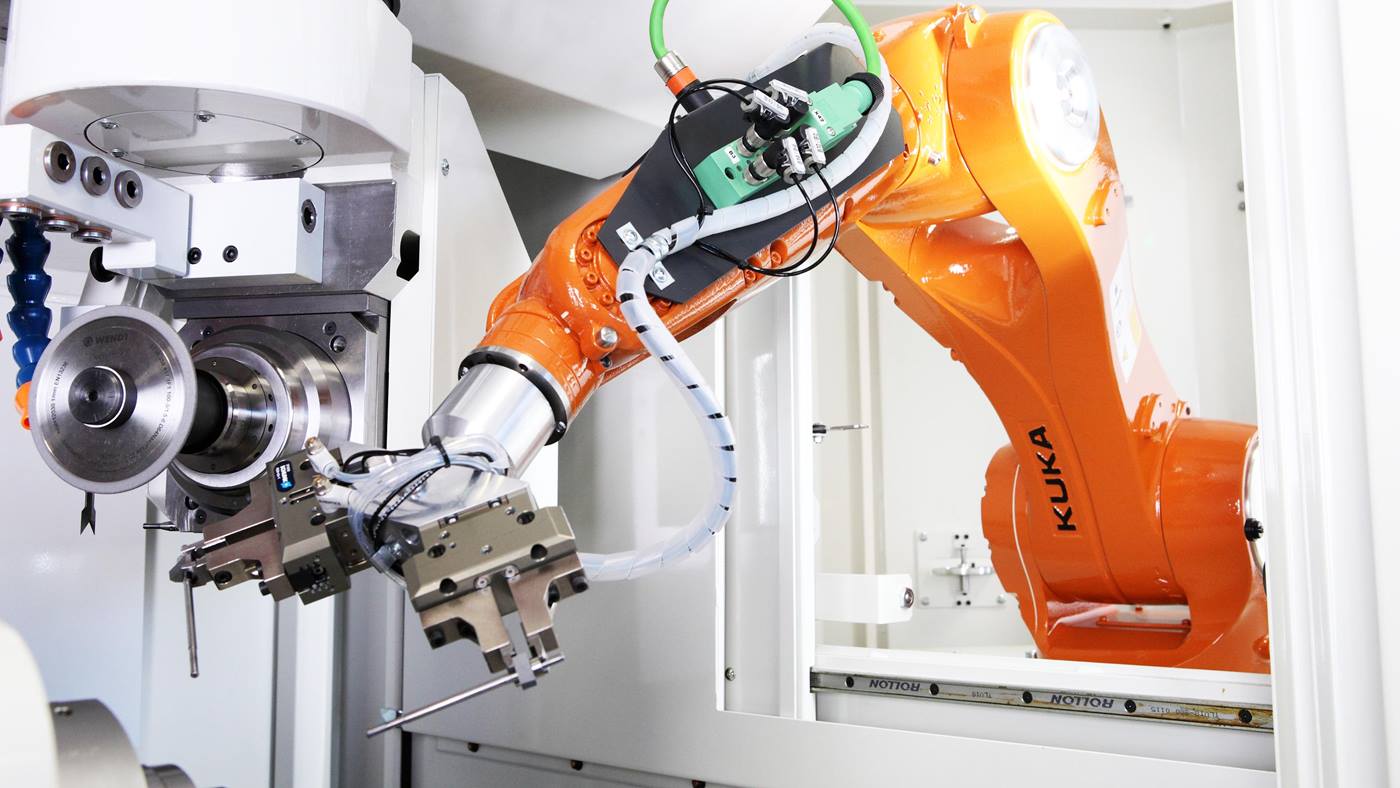
적은 생산 개수, 높은 복잡성, 그리고 가능한 한 빨리. 개별적인 고객 요청은 숙련된 노동력 부족, 원자재 및 서비스 가격 상승과 함께 산업 기업의 도전 과제입니다. 이것은 자동화로 해결할 수 있습니다. 예를 들어 팔레타이징, 핸들링 또는 조립 작업과 공작물 가공의 자동화는 이미 상당히 진전되었습니다. 그러나 공구를 사용하는 기계의 유연하고 자동화된 로딩 및 언로딩은 아직 초기 단계에 있습니다. 세계적으로 활동하는 HELLER 그룹은 KUKA와 함께 이러한 격차를 좁힐 수 있는 파일럿 프로젝트를 시작하고 시행했습니다.