ระบบอัตโนมัติสำหรับการขนถ่ายของลงเครื่องจักรยังคงอยู่ในช่วงเริ่มต้น
ปริมาณน้อย ความซับซ้อนสูง และแน่นอนว่าทุกอย่างต้องเร็วที่สุด ความต้องการของลูกค้าแต่ละรายสร้างความท้าทายให้กับบริษัทอุตสาหกรรม บวกกับการขาดแคลนแรงงานที่มีทักษะ และราคาที่สูงขึ้นของวัตถุดิบและบริการด้วย ปัญหาเหล่านี้สามารถคลี่คลายได้ด้วยระบบอัตโนมัติ ตัวอย่างเช่น ระบบอัตโนมัตินั้นก้าวหน้าไปมากแล้วสำหรับงานจัดเรียงบนพาเลท การจัดการ หรือการประกอบ รวมถึงการขึ้นรูปชิ้นงาน อย่างไรก็ตาม การขนถ่ายของเข้าออกเครื่องจักรโดยอัตโนมัติและมีความยืดหยุ่นด้วยเครื่องมือนั้นยังอยู่ในช่วงเริ่มต้น KUKA และกลุ่มบริษัท HELLER ที่ดำเนินกิจการทั่วโลกได้เปิดตัวและดำเนินโครงการนำร่องที่สามารถปิดช่องโหว่นี้ได้อย่างแม่นยำ
องค์ความรู้เรื่องวิทยาการหุ่นยนต์แบบเจาะลึกสำหรับการทำงานเป็นอัตโนมัติมากขึ้น
“ในอุตสาหกรรมนี้มีความเป็นไปได้จำนวนมาก ไม่ใช่แค่เพียงด้านหน้าเครื่องจักรเท่านั้นที่สามารถเปลี่ยนให้ทำงานอัตโนมัติได้ แต่ระบบหลังบ้านก็สามารถทำได้” Robert Eber ผู้รับผิดชอบด้านการวางพาเลทโดยอัตโนมัติและระบบอัตโนมัติของหุ่นยนต์ที่ HELLER กล่าว กลุ่มบริษัทได้ผลิตเครื่องมือกล CNC และระบบการผลิตที่ทันสมัยที่สุดสำหรับการตัดเฉือนตรงสถานที่การผลิตห้าแห่งทั่วโลก บริษัทจำนวนมากจากอุตสาหกรรมวิศวกรรมเครื่องกลทั่วไป เทคโนโลยีพลังงาน เทคโนโลยีของไหล อุตสาหกรรมการบินและอวกาศ อุตสาหกรรมยานยนต์ และซัพพลายเออร์จากบริษัทเหล่านั้น ตลอดจนจากอุตสาหกรรมอื่นๆ ล้วนเป็นลูกค้าของบริษัทที่ก่อตั้งขึ้นในปี 1894 ที่เมือง Nürtingen HELLER เคยใช้โซลูชั่นแบบใช้หุ่นยนต์จาก KUKA สำหรับงานก่อนหน้านี้แล้ว อย่างไรก็ตาม สำหรับโครงการนำร่องในการขนถ่ายของลงเครื่องจักรด้วยหุ่นยนต์ ถือว่าทั้งสองบริษัทได้ทำงานร่วมกันเป็นครั้งแรกเพื่อพัฒนาการใช้งานที่สามารถนำออกสู่ตลาดได้
HELLER พึ่งพาโซลูชั่นเฉพาะลูกค้าและเทคโนโลยีระบบอัตโนมัติที่เกี่ยวข้องกับโซลูชั่นนั้นๆ
มีความยืดหยุ่นสูง: การยกของเข้าออกเครื่องจักรด้วยหุ่นยนต์เคลื่อนที่
การทำงานร่วมกันเริ่มต้นจากเป้าหมายในการค้นหาว่าสามารถปล่อยให้ขั้นตอนแบบเมนนวลเป็นแบบอัตโนมัติ และขีดจำกัดอยู่ตรงไหน “เราติดต่อบริษัท HELLER และถามว่าพวกเขามองเห็นความจำเป็นในระบบหุ่นยนต์เคลื่อนที่หรือไม่ และเราก็ได้รับคำตอบโดยตรงว่าใช่ จากนั้นก็เกิดเป็นไอเดียแรกเริ่มขึ้นมา ต่อด้วยแนวคิด และโครงการนำร่องของเราในที่สุด” Steffen Günther ผู้จัดการฝ่ายพัฒนาธุรกิจระดับโลกของ KUKA รายงาน ทั้งสองบริษัทเปิดตัวโครงการในฤดูใบไม้ผลิปี 2021 ซึ่งเป็นปีที่ดี ถึงแม้ว่าจะเจอความท้าทายบ้างเล็กน้อย แต่สุดท้ายแล้วก็ได้เจอกับกระบวนการที่เหมาะสม
หุ่นยนต์เคลื่อนที่เพื่อผลผลิตที่เพิ่มขึ้น
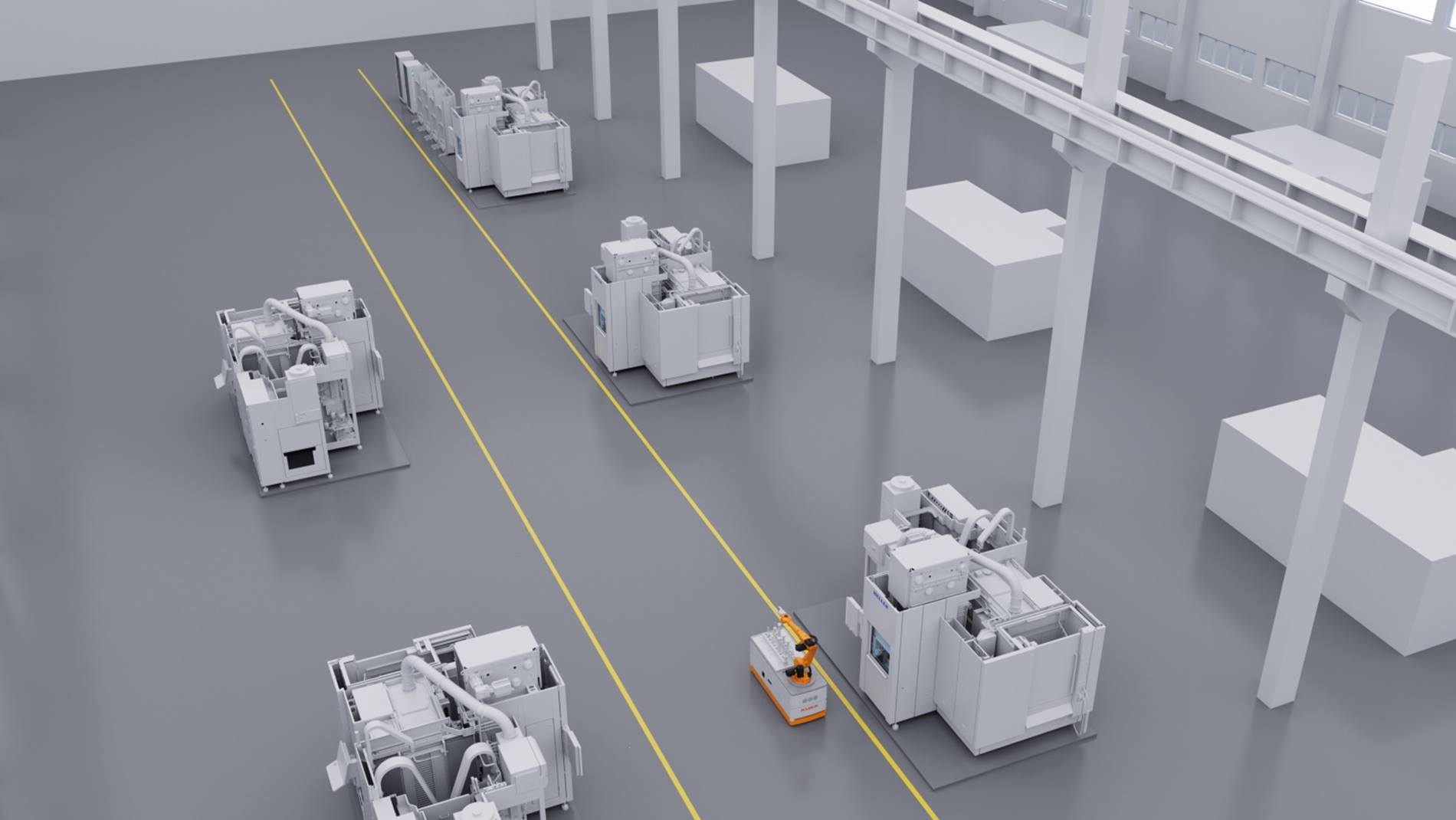
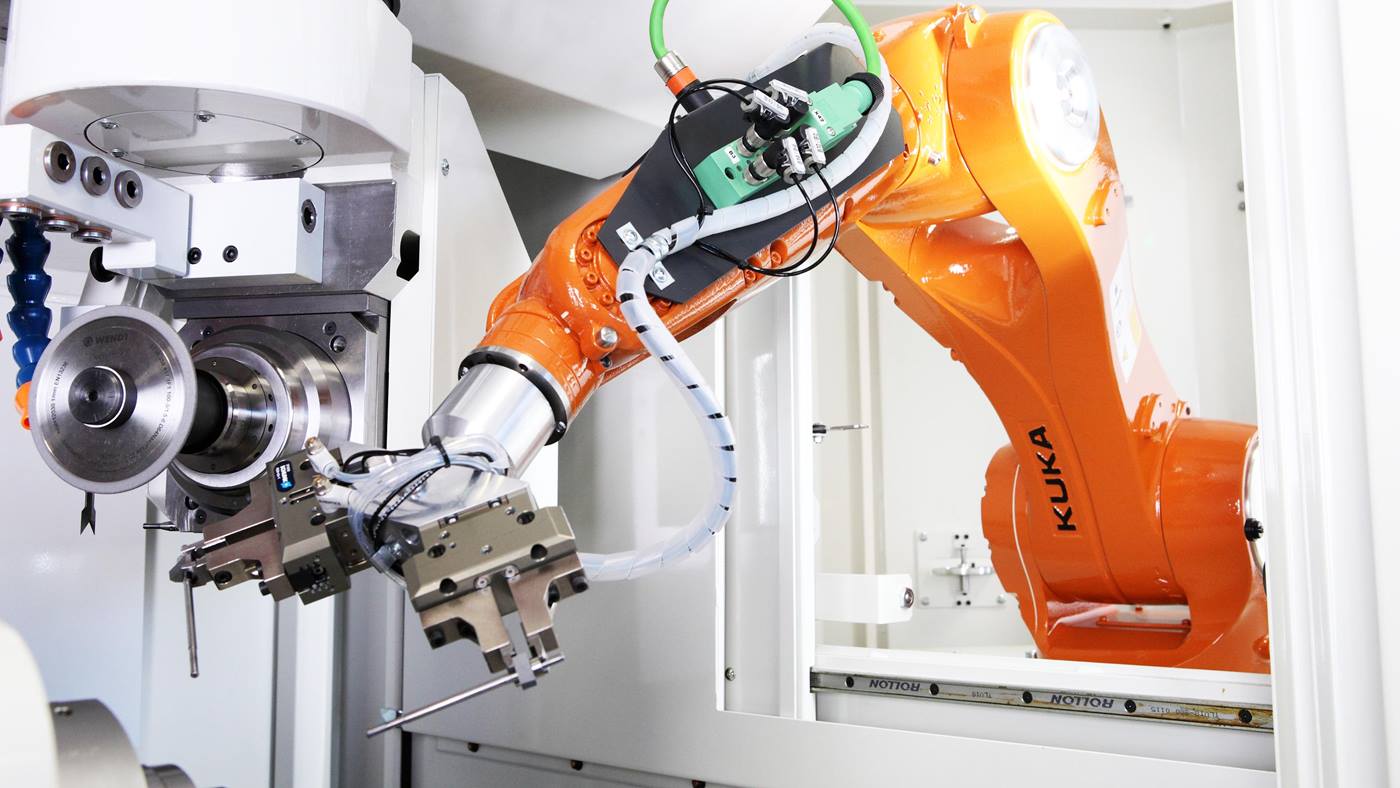
และมีการทำงานดังนี้ คอมพิวเตอร์ตัวหลักในเครือข่ายของบริษัท CERTA จะกำหนดเครื่องมือที่เครื่องจักรต้องการ โดยใช้ข้อมูลจากใบสั่งผลิตที่พนักงานให้มา คอมพิวเตอร์จะสั่งให้ KMR CYBERTECH นำเครื่องมือที่เหมาะสมออกจากคลังสินค้า แพลตฟอร์มเคลื่อนที่ ซึ่งขับเคลื่อนด้วยเทคโนโลยีรอบทิศทางและติดตั้ง KR CYBERTECH ไว้ด้วยจะเริ่มเคลื่อนที่และทำหน้าที่ยกของเข้าออกเครื่องจักร “KMR CYBERTECH เป็นผลิตภัณฑ์ที่เหมาะที่สุดสำหรับงานนี้ เนื่องจากตัวจับยึดเครื่องมือรองรับน้ำหนักได้มากถึง 20 กิโลกรัม” Steffen Günther กล่าว แขนกลจะหยิบเครื่องมือที่เกี่ยวข้องและจัดวางลงบนอุปกรณ์ติดตั้งที่เหมาะสมบนแพลตฟอร์ม จากนั้นหุ่นยนต์ก็จะเคลื่อนที่ทำงานต่อไป
ข้อได้เปรียบของหุ่นยนต์เคลื่อนที่
KMR CYBERTECH นำชิ้นส่วนไปยังเครื่องจักรที่เหมาะสมและจัดวางในบริเวณที่ต้องการได้ “โซลูชั่นอัตโนมัติสำหรับการขนถ่ายของลงเครื่องจักรอัตโนมัติช่วยให้พนักงานไม่ต้องเดินไปที่เครื่องจักรและใส่เครื่องมือ ซึ่งช่วยให้เราเลิกโฟกัสกับงานที่ต้องใช้แรงงานคนได้” Robert Eber อธิบาย ในโซลูชั่นนี้ KMR CYBERTECH ไม่เพียงแค่รับผิดชอบเรื่องการขนถ่ายของเข้าออกเท่านั้น แต่ยังดูแลในเรื่องของการเปลี่ยนใหม่ด้วย ตัวอย่างเช่น เมื่อคอมพิวเตอร์หลักในเครือข่ายได้รับข้อมูลเกี่ยวกับเครื่องมือที่สึกหรอ แพลตฟอร์มจะเคลื่อนที่เข้าสู่เครื่องที่เกี่ยวข้องทันที ขนออกมา ขนย้าย นำเครื่องมือใหม่ออกมา แล้วใส่เข้าไปในเครื่อง เท่านี้ก็เสร็จแล้ว
หุ่นยนต์สามารถเรียนรู้การใช้งานเครื่องมือกลได้
หุ่นยนต์เคลื่อนที่อัตโนมัติในโรงงาน
ความท้าทายโดยเฉพาะในการพัฒนาโซลูชั่นนี้สำหรับการขนถ่ายของลงเครื่องจักรอัตโนมัติคือการสื่อสารระหว่างระบบที่เกี่ยวข้องทั้งหมด “ข้อมูลใดสามารถใช้ได้ตอนไหนและที่ไหน ความท้าทายที่ยิ่งใหญ่ที่สุดสำหรับเราคืออินเทอร์เฟซสำหรับการแลกเปลี่ยนข้อมูล” Robert Eber กล่าว ความเชี่ยวชาญด้านระบบอัตโนมัติที่สั่งสมมาอย่างยาวนานของ KUKA และ HELLER ทำให้ได้พบวิธีที่เหมาะสมหลังจากการทดสอบหลายครั้ง เพื่อให้แพลตฟอร์มเคลื่อนที่ทำได้มากกว่าเพียงแค่ย้ายจาก A ไป B ในตอนนี้ แพลตฟอร์มดังกล่าวได้รับข้อมูลที่จำเป็นสำหรับงานนั้นๆ โดยเฉพาะ ซึ่งช่วยให้ทราบอย่างชัดเจนว่าต้องทำอะไรในเวลาใด
ความยืดหยุ่นสำหรับผู้ใช้
นอกจากนี้ โครงการนำร่องจะต้องตอบโจทย์ความต้องการที่สองของเราได้ด้วยเช่นกัน “เราต้องการเปลี่ยนแปลงจากการทำงานแบบใช้งานแรงงานคนให้น้อยที่สุด” Eber ระบุ “นั่นหมายความว่า พนักงานควรจะสามารถใส่เครื่องมือและจัดการข้อมูลต่อไปได้ หากจำเป็น”
คำขอของลูกค้าสำหรับหุ่นยนต์ที่เครื่องมือกล
โครงการสิ้นสุดลงแล้ว มีความเป็นไปได้ว่า การสื่อสารถือว่าเวิร์กและทั้งมนุษย์และหุ่นยนต์สามารถขนถ่ายเครื่องมือลงเครื่องจักรได้ “ตอนนี้เราจะคอยสังเกตตลาดรวมถึงพร้อมที่จะก้าวขึ้นอีกไปอีกขั้นและตอบสนองต่อคำขอของลูกค้า” Eber เน้นย้ำ สำหรับ KUKA นี่เป็นโครงการใหญ่โครงการแรกที่เกี่ยวข้องกับระบบหุ่นยนต์เคลื่อนที่ในด้านระบบอัตโนมัติของเครื่องมือกล Steffen Günther เชื่อมั่นว่าสิ่งนี้จะช่วยแก้ปัญหาการขาดแคลนแรงงานที่มีทักษะและเสริมสร้างความแข็งแกร่งให้กับบริษัทอุตสาหกรรมได้ “ระบบบหุ่นยนต์เคลื่อนที่สามารถทำงานนี้ได้ทุกวันตลอด 24 ชั่วโมง และพนักงานที่มีทักษะสามารถโฟกัสกับความสามารถของพวกเขาและกิจกรรมที่สร้างมูลค่ามากขึ้นได้” เราวางรากฐานไว้ให้แล้ว รวมถึงมีการสร้างโครงการและข้อเสนอของลูกค้ารายแรกขึ้นแล้วจากความร่วมมือกับ HELLER ภารกิจในตอนนี้คือการรวมโครงการที่มองไกลถึงอนาคตเข้ากับโถงการผลิตของผู้ผลิตเครื่องมือรายอื่น