원활한 로봇 통합은 원활하게 통합된 컨트롤에서 시작됩니다.
KUKA의 로봇 공학은 고객의 생산 환경에 완벽하게 어우러집니다. 우리는 광범위한 포트폴리오, 많은 프로세스 및 통합 지식, 특히 이상적인 소프트웨어를 통해 이를 보장합니다.
현재 이전 브라우저 버전의 Internet Explorer를 사용하고 계십니다.
최적화된 보기를 위해 브라우저를 업데이트해 주십시오.

KUKA.PLC mxAutomation은 범용 PLCopen 인증 PLC 인터페이스입니다. 이와 함께라면 기존 제어 환경에서 직접 모든 주요 로봇 기능을 프로그래밍 및 조작할 수 있습니다.
KUKA의 로봇 공학은 고객의 생산 환경에 완벽하게 어우러집니다. 우리는 광범위한 포트폴리오, 많은 프로세스 및 통합 지식, 특히 이상적인 소프트웨어를 통해 이를 보장합니다.
KUKA.PLC mxAutomation을 통해 직원들은 기존 제어 환경을 벗어나지 않고도 로봇 공학을 이해, 조작 및 프로그래밍할 수 있습니다.
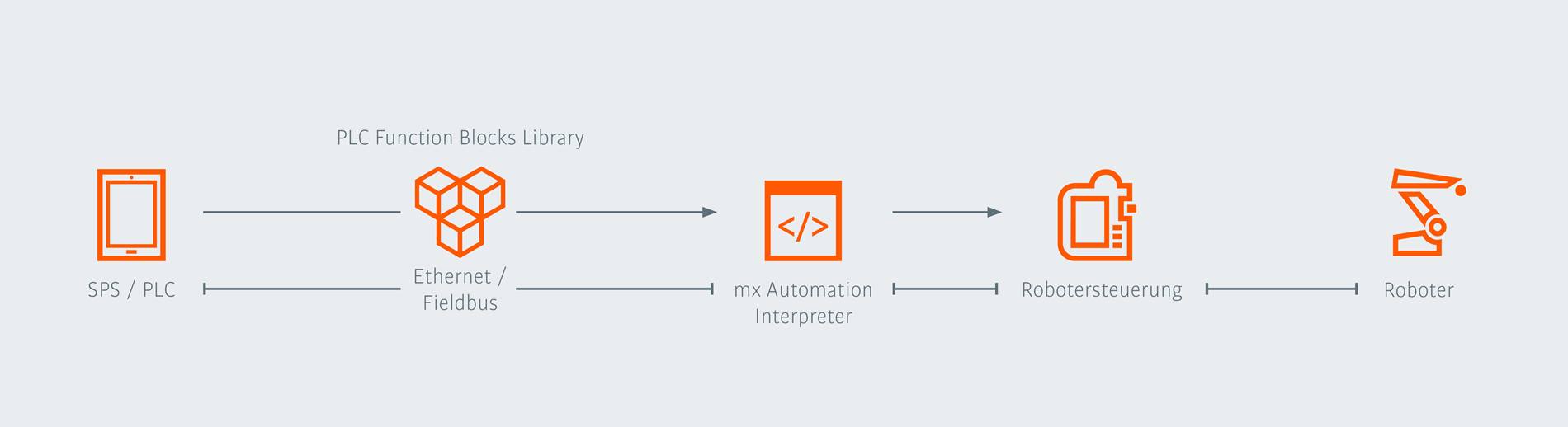
KUKA.SystemSoftware(KSS)의 모든 주요 기능은 시스템의 기존 PLC(Programable Logic Control, 프로그래밍 가능한 로직 컨트롤러)에서 직접 사용할 수 있습니다. 로봇 컨트롤은 움직임과 전체 안전 기능을 계속 제어합니다.
이때 로봇 공학과 PLC 간의 통신은 일방통행이 아닙니다. 명령이 로봇에 전송될 때와 같이 진단 및 상태 정보가 컨트롤에 피드백됩니다.
당사의 모든 기계는 제어 모듈(KRC)과 함께 제공됩니다. 여기에는 전체 기능을 제어하는 KUKA.SystemSoftware(KSS)가 포함됩니다.
컨트롤러는 안전 모니터링, 경로 계획, 과부하 제한, 변형 및 에너지 관리를 계속 수행합니다. 이러한 기능과 프로세스는 로봇 컨트롤에서 기존과 같은 고성능 및 보안 수준으로 실행됩니다.
KCR과 PLC 간의 연결은 이더넷/필드버스를 통해 이루어집니다. mxAutomation은 모든 주요 제조업체를 지원합니다.
KRC_MoveLinearAbsolute: 절대 직교좌표 위치에 선형으로 접근
KRC_MoveLinearRelative: 선형 이동으로 상대 직교좌표 위치에 접근
KRC_MoveDirectAbsolute: 절대 직교좌표 위치에 가능한 한 빨리 접근 – PTP 이동
KRC_MoveDirectRelative: 상대 직교좌표 위치에 가능한 한 빨리 접근 – PTP 이동
KRC_MoveAxisAbsolute: 축별 위치에 가능한 한 빨리 접근
KRC_MoveCircAbsolute: 원형 이동으로 절대 직교좌표 위치에 접근
KRC_MoveCircRelative: 원형 이동으로 상대 직교좌표 위치에 접근
KRC_Jog: TOOL 또는 BASE 좌표계에서 조그 모드로 이동 및 축별 이동
KRC_DeclareInterrupt: 인터럽트 선언
KRC_ActivateInterrupt: 이전에 선언된 인터럽트 활성화
KRC_DeactivateInterrupt: 이전에 선언된 인터럽트 비활성화
KRC_ReadInterruptState: 인터럽트 상태 읽기
KRC_SetDistanceTrigger: 트랙 포인트로 스위칭 작업 활성화
KRC_SetPathTrigger: 트랙 기준의 스위칭 작업 활성화
KRC_ReadDigitalInput: 디지털 입력 읽기, 주기적 및 비주기적
KRC_ReadDigitalOutput: 디지털 출력 읽기
KRC_WriteDigitalOutput: 디지털 출력 쓰기, 주기적 및 비주기적
KRC_ReadAnalogInput: 아날로그 입력 읽기
KRC_ReadAnalogOutput: 아날로그 출력 읽기
KRC_WriteAnalogOutput: 아날로그 출력 쓰기
KRmsgNet: 모든 오류 메시지를 일반 텍스트로 전송. 언어 전환 및 KRC 시간 조정
KRC_Error: 오류 상태 읽기 및 확인
KRC_ReadMXAStatus: mxA 인터페이스의 현재 상태 읽기
KRC_ReadMXAError: mxA 인터페이스의 오류 메시지 읽기
KRC_MessageReset: mxA 인터페이스의 오류 메시지 확인
KRC_ReadKRCError: 로봇 컨트롤의 오류 메시지 읽기
KRC_Diag: 하트비트 및 진단 신호 읽기
KRC_WriteWorkspace: 직교좌표 작업 공간 구성
KRC_ReadWorkspace: 직교좌표 작업 공간의 구성 읽기
KRC_WriteAxWorkspace: 축별 작업 공간 구성
KRC_ReadAxWorkspace: 축별 작업 공간의 구성 읽기
KRC_ReadWorkstates: 작업 공간의 상태 읽기
KUKA.SafeOperation 소프트웨어와 조합하여 시스템 설치 공간을 줄이고, 빠르고 안전하며 콤팩트하게 생산할 수 있습니다. 이를 통해 셀 구성 및 인간-로봇 협업을 훨씬 더 경제적으로 이용할 수 있습니다.
주석: 이러한 기능 블록을 사용할 수 있으려면 로봇 컨트롤에 KUKA.SafeOperation이 설치되어 있어야 합니다.
주석: 이러한 기능 블록을 사용할 수 있으려면 로봇 컨트롤에 KUKA.ConveyorTech가 설치되어 있어야 합니다.
KRC_VectorMoveOn: 벡터를 따라 이동 활성화
KRC_VectorMoveOff: 벡터를 따라 이동 비활성화
비고: 이러한 기능 블록을 사용할 수 있으려면 로봇 컨트롤에 KUKA.VectorMove가 설치되어 있어야 합니다.
KRC_LDDconfig: 부하 데이터 결정 구성
KRC_LDDtestRun: 감소된 프로세스 속도에서 부하 데이터를 결정하기 위한 테스트 이동 실행
KRC_LDDstart: 부하 데이터 결정 실행
KRC_LDDwriteLoad: 측정값을 특정 툴로 전송
주석: 전제 조건은 V7.2의 KUKA.LoadDataDetermination이 설치되어 있다는 것입니다.
다수의 유명 제조업체에서 mxAutomation PLC 기능 블록 라이브러리의 PLC 통합을 표준으로 제공합니다. 또한 C++ 또는 C#을 통해 mxAutomation을 PC 기반 제어 시스템에 통합하는 것도 가능합니다. 당사의 파트너와 함께 전체 명령 및 기능이 항상 최신 기술에 기반하며 유럽, 아시아 및 미국에서 전 세계적으로 사용 가능하도록 노력하고 있습니다.
다음 시스템은 KUKA.PLC mxAutomation을 지원합니다.
- STEP 7 V5.4, S7-300 및 S7-400
- STEP 7(TIA Portal), S7-300 및 S7-400
- STEP 7(TIA Portal), S7-1500
- TIA Portal(SIMATIC)
- SIMOTION
- SINUMERIK(Run myRobot); 하기 참조