人机之间的简单接口
KUKA.PLC mxAutomation 让您的员工无需离开熟悉的控制环境即可理解、操作和编程机器人技术。
KUKA.SystemSoftware (KSS) 的所有重要功能都可以直接在系统现有的 PLC(Programmable Logic Controller)中使用。机器人控制器会负责控制运动和所有安全功能。
机器人和 PLC 之间的通信并非是单向的。在指令向机器人发送的同时,诊断和状态信息也会反馈给控制器。

KUKA.PLC mxAutomation 是一个通用的 PLCopen 认证的 PLC 接口。使用这套软件,您可以直接在您熟悉的控制环境中对所有的重要机器人功能进行编程和操作。
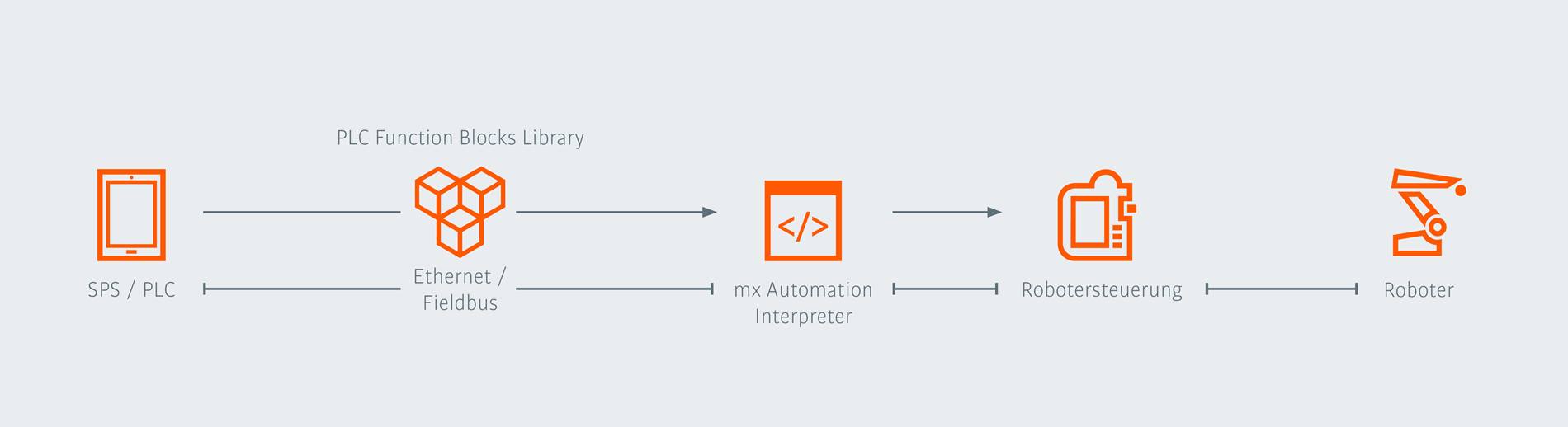
通过控制系统软件 KUKA.PLC mxAutomation,配有嵌入式 PLC 的外部控制系统可以用基本的运动指令命令KUKA 机器人。这以一种简单方式来实现一种便于使用的核心操作理念,适用于由机器人控制的生产用机器。
同时,KUKA 控制系统 KR C4 出色的运动功能和安全功能继续可供使用。因为 KR C4 的 mxAutomation 指令解释器将 PLC 指令 发送给使机器人以熟悉的精度和可靠性运动的轨迹规划系统。
KUKA.PLC mxAutomation 让您的员工无需离开熟悉的控制环境即可理解、操作和编程机器人技术。
KUKA.SystemSoftware (KSS) 的所有重要功能都可以直接在系统现有的 PLC(Programmable Logic Controller)中使用。机器人控制器会负责控制运动和所有安全功能。
机器人和 PLC 之间的通信并非是单向的。在指令向机器人发送的同时,诊断和状态信息也会反馈给控制器。
我们的每一台机器都随附一个控制模块 (KRC)。其中包含用于控制所有功能的 KUKA.SystemSoftware (KSS)。
控制器仍然负责安全监控、轨迹规划、过载限制、转换和能源管理等任务。这些功能和流程将照常在机器人控制器上高效安全地运行。
通过以太网/现场总线建立 KCR 与 PLC 之间的连接。mxAutomation 可支持所有主要制造商:
KRC_MoveLinearAbsolute:直线趋近绝对笛卡尔位置
KRC_MoveLinearRelative:以直线运动接近相对笛卡尔位置
KRC_MoveDirectAbsolute:尽快趋近绝对笛卡尔位置 – PTP 运动
KRC_MoveDirectRelative:尽快趋近相对笛卡尔位置 – PTP 运动
KRC_MoveAxisAbsolute:尽快趋近轴特定位置
KRC_MoveCircAbsolute:以圆周运动接近绝对笛卡尔位置
KRC_MoveCircRelative:以圆周运动接近相对笛卡尔位置
KRC_Jog:在 TOOL 或 BASE 坐标系中以点动模式移动以及单轴移动
KRC_DeclareInterrupt:声明中断
KRC_ActivateInterrupt:激活之前声明的中断
KRC_DeactivateInterrupt:停用之前声明的中断
KRC_ReadInterruptState:读取中断状态
KRC_SetDistanceTrigger:触发到轨迹点的切换动作
KRC_SetPathTrigger:触发轨迹相关的切换动作
KRC_ReadDigitalInput:循环和非循环地读取数字输入
KRC_ReadDigitalOutput:读取数字输出
KRC_WriteDigitalOutput:循环和非循环地写入数字输出
KRC_ReadAnalogInput:读取模拟输入
KRC_ReadAnalogOutput:读取模拟输出
KRC_WriteAnalogOutput:写入模拟输出
KRmsgNet:以明文传输所有错误信息。切换语言和调整 KRC 的时间
KRC_Error:读取并确认错误状态
KRC_ReadMXAStatus:读取 mxA 接口的当前状态
KRC_ReadMXAError:读取 mxA 接口的错误信息
KRC_MessageReset:确认 mxA 接口的错误信息
KRC_ReadKRCError:读取机器人控制器错误信息
KRC_Diag:读取心跳和诊断信号
KRC_WriteWorkspace:配置笛卡尔工作空间
KRC_ReadWorkspace:读取笛卡尔工作空间的配置
KRC_WriteAxWorkspace:配置轴特定工作空间
KRC_ReadAxWorkspace:读取轴特定工作空间的配置
KRC_ReadWorkstates:读取工作空间的状态
您可以搭配使用 KUKA.SafeOperation 软件减少您系统的空间需求,快速、安全和紧凑地进行生产。如此您可以更经济高效地使用工作单元配置和人机协作。
备注:为了能够使用这些功能块,必须在机器人控制器上安装 KUKA.SafeOperation。
备注:为了能够使用这些功能块,必须在机器人控制器上安装 KUKA.ConveyorTech。
KRC_VectorMoveOn:激活沿着矢量的运动
KRC_VectorMoveOff:停用沿着矢量的运动
备注:为了能够使用这些功能块,必须在机器人控制器上安装 KUKA.VectorMove。
KRC_LDDconfig:负载数据确定的配置
KRC_LDDtestRun:执行测试运动,以确定较低过程速度的负载数据
KRC_LDDstart:执行负载数据确定
KRC_LDDwriteLoad:将量测值传输到特定工具
备注:前提条件是已安装了 V7.2 以上的 KUKA.LoadDataDetermination。
- STEP 7 V5.4、S7-300 和 S7-400
- STEP 7 (TIA Portal)、S7-300 和 S7-400
- STEP 7 (TIA Portal)、S7-1500
- TIA Portal (SIMATIC)
- SIMOTION
- SINUMERIK (Run myRobot);见下文