シームレスなロボット統合は、シームレスに統合されたコントローラから始まります
KUKAのロボティクスは、お客様の生産環境に完全に適合します。当社は、幅広いポートフォリオ、プロセスと統合に関する豊富な知識、そして理想的なソフトウェアによってこれを保証いたします。
Internet Explorerの旧バージョンのブラウザが使用されています。
最適な表示にするにはブラウザを更新してください

KUKA.PLC mxAutomationは、PLCopen認定のユニバーサルPLCインターフェースです。これを使用することで、慣れた制御環境で、すべての重要なロボット機能を直接プログラミングして操作できます。
KUKAのロボティクスは、お客様の生産環境に完全に適合します。当社は、幅広いポートフォリオ、プロセスと統合に関する豊富な知識、そして理想的なソフトウェアによってこれを保証いたします。
KUKA.PLC mxAutomationにより、お客様のスタッフは慣れ親しんだ制御環境から離れることなく、ロボティクスを理解し、操作し、プログラミングすることができます。
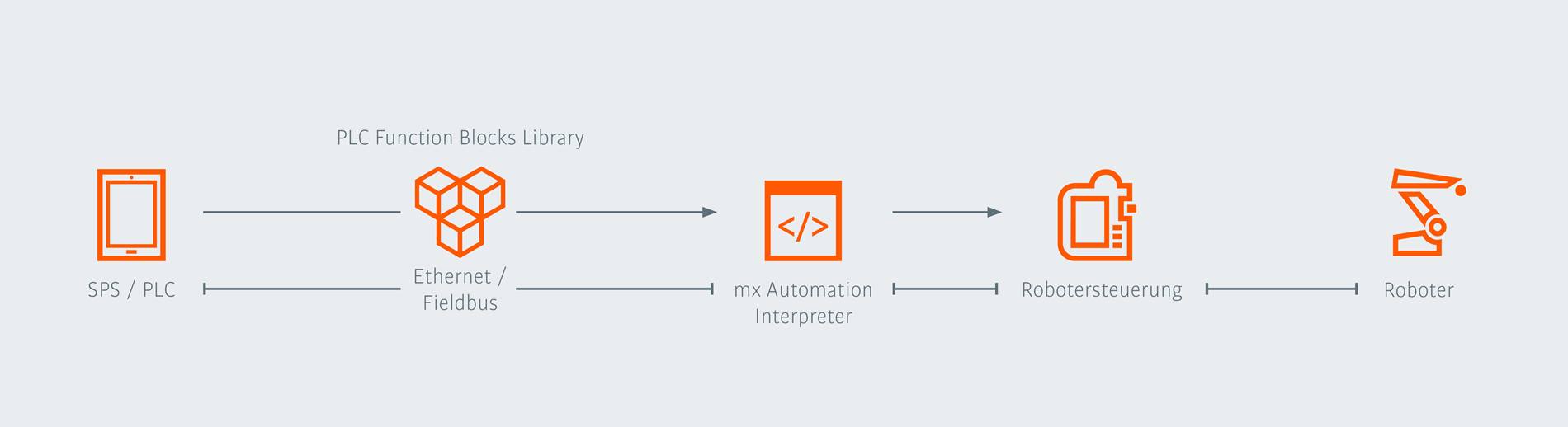
KUKA.SystemSoftware (KSS) のすべての重要な機能は、システムにすでにある PLC (Programable Logic Control) で直接利用できます。動作の制御とすべての安全機能は、これまで通りロボットコントローラーが引き続き制御します。
その際、ロボティクスとPLCの間の通信は一方通行ではありません。コマンドがロボットに送信されるのと同様に、診断およびステータス情報がコントローラに返信されます。
当社の各機械には、制御モジュール (KRC) が付属しています。これには、全機能を制御するKUKA.SystemSoftware (KSS) が含まれています。
またコントローラはさらに、安全監視、経路計画、過負荷制限、変換またはエネルギー管理も行います。これらの機能およびプロセスは、通常通りの高性能と安全性でロボットコントローラー上で実行されます。
KCRとPLCの接続は、イーサネット/フィールドバスを介して確立されます。mxAutomationは、すべての主要メーカーをサポートしています。
KRC_MoveLinearAbsolute: 絶対デカルト座標位置に直線的に接近する
KRC_MoveLinearRelative: 直線移動による相対デカルト座標位置への接近
KRC_MoveDirectAbsolute: できるだけ早く絶対デカルト座標位置に接近する – PTP動作
KRC_MoveDirectRelative: できるだけ早く相対デカルト座標位置に接近する – PTP動作
KRC_MoveAxisAbsolute: 軸別の位置にできるだけ早く接近する
KRC_MoveCircAbsolute: 円運動で絶対デカルト座標位置に接近する
KRC_MoveCircRelative: 円運動による相対デカルト座標位置への接近
KRC_Jog: TOOLまたはBASE座標系でのジョグモードによる移動、および軸単位での移動
KRC_DeclareInterrupt: 割り込みの宣言
KRC_ActivateInterrupt: 以前に宣言された割り込みを有効にする
KRC_DeactivateInterrupt: 以前に宣言された割り込みを無効にする
KRC_ReadInterruptState: 割り込みのステータスを読み取る
KRC_SetDistanceTrigger: 経路ポイントへの切替えアクションを有効にする
KRC_SetPathTrigger: 経路関連の切替えアクションを有効にする
KRC_ReadDigitalInput: デジタル入力を読み取る(周期的および非周期的に)
KRC_ReadDigitalOutput: デジタル出力を読み取る
KRC_WriteDigitalOutput: デジタル出力を書き込む(周期的および非周期的に)
KRC_ReadAnalogInput: アナログ入力を読み取る
KRC_ReadAnalogOutput: アナログ出力を読み取る
KRC_WriteAnalogOutput: アナログ出力を書き込む
KRmsgNet: すべてのエラーメッセージをプレーンテキストで転送する。KRCの言語切替えおよび時間調整
KRC_Error: エラー状態を読み取り確認する
KRC_ReadMXAStatus: mxAインターフェースの現在のステータスを読み取る
KRC_ReadMXAError: mxAインターフェースのエラーメッセージを読み取る
KRC_MessageReset: mxAインターフェースのエラーメッセージを確認する
KRC_ReadKRCError: ロボットコントローラーのエラーメッセージを読み取る
KRC_Diag: ハートビートと診断信号を読み取る
KRC_WriteWorkspace: デカルト座標作業領域を構成する
KRC_ReadWorkspace: デカルト座標作業領域の構成を読み取る
KRC_WriteAxWorkspace: 軸別作業領域を構成する
KRC_ReadAxWorkspace: 軸別作業領域の構成を読み取る
KRC_ReadWorkstates: 作業領域のステータスを読み取る
ソフトウェアKUKA.SafeOperationと組み合わせることで、設備の必要スペースを減らし、素早く安全に、そしてコンパクトに生産できます。これにより、セル構成およびヒューマン・ロボット・コラボレーションをさらにコスト効率よく利用することができます。
注記:これらの機能ブロックを使用するためには、KUKA.SafeOperationをロボットコントローラーにインストールする必要があります。
注記:これらの機能ブロックを使用できるようにするには、KUKA.ConveyorTechがロボットコントローラーにインストールされている必要があります。
KRC_VectorMoveOn: ベクトルに沿った動きを有効にする
KRC_VectorMoveOff: ベクトルに沿った動きを無効にする
注記:これらの機能ブロックを使用できるようにするには、KUKA.VectorMoveがロボットコントローラーにインストールされている必要があります。
KRC_LDDconfig: 負荷データ検出の構成
KRC_LDDtestRun: プロセス速度を下げて、負荷データを検出するためのテスト動作を実行する
KRC_LDDstart: 負荷データ検出を実行する
KRC_LDDwriteLoad: 測定値を特定のツールに転送する
注記:前提条件として、KUKA.LoadDataDeterminationのV7.2以降がインストールされていること。
多くの有名メーカーは、mxAutomation PLC Function Blocks LibraryのPLC統合を標準として提供しています。さらに、C++または C#を介してmxAutomationをPCベースの制御システムに統合することも可能です。当社は、パートナーと協力して、全コマンドと全機能を常に最新の状態に保ち、ヨーロッパ、アジア、アメリカの全域で利用できるようにしています。
以下のシステムがKUKA.PLC mxAutomationをサポートしています:
- STEP 7 V5.4、S7-300およびS7-400
- STEP 7 (TIA Portal)、S7-300およびS7-400
- STEP 7 (TIA Portal)、S7-1500
- TIA Portal (SIMATIC)
- SIMOTION
- SINUMERIK (Run myRobot)、下記参照