機器人的無縫整合始於完美搭配的內建控制器
KUKA 的機器人能夠完美適應您的生產環境。我們提供廣泛的產品組合、大量有關流程和整合的專業知識,當然還有理想的軟體,以確保機器人順利運作。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果

KUKA.PLC mxAutomation 是一個通用的 PLCopen 認證的 PLC 介面。您可以透過這套軟體直接在您熟悉的控制環境中,對所有的KUKA機器人進行程式設計和操作。
KUKA 的機器人能夠完美適應您的生產環境。我們提供廣泛的產品組合、大量有關流程和整合的專業知識,當然還有理想的軟體,以確保機器人順利運作。
KUKA.PLC mxAutomation 讓您的員工無需離開熟悉的控制環境即可理解、操作和程設機器人技術。
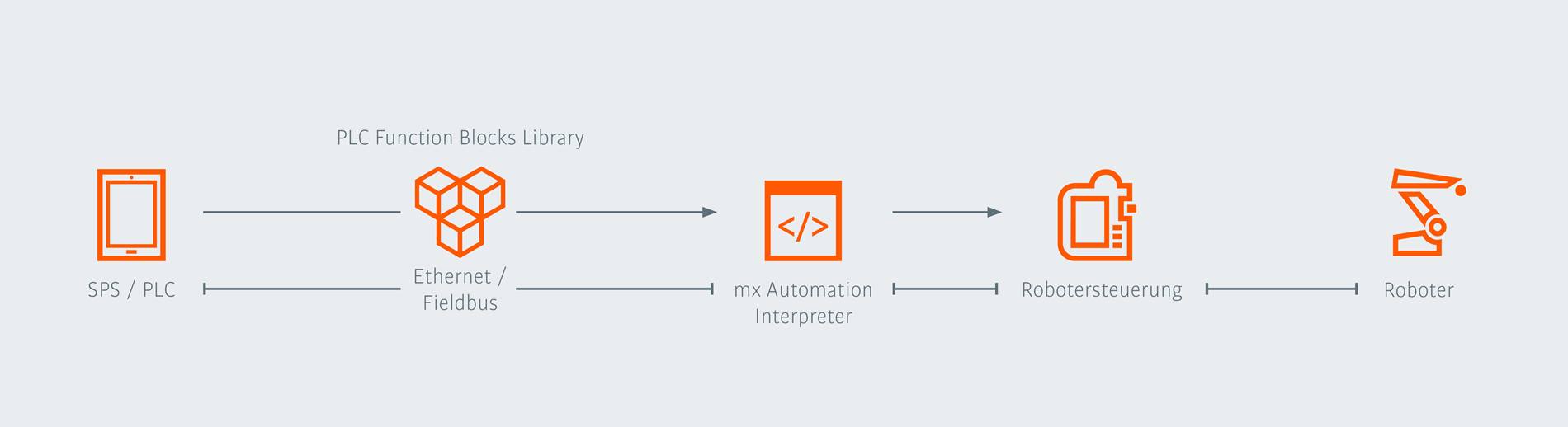
KUKA.SystemSoftware (KSS) 的所有重要功能都可以直接在系統現有的 PLC(可程式化邏輯控制器)中使用。機器人控制器會繼續負責控制運動和所有安全功能。
機器人和 PLC 之間的通訊並非單向。正如向機器人發送指令一樣,診斷和狀態資訊也會反饋給控制器。
我們的每一台機器都隨附一個控制模組 (KRC),包含用于控制所有功能的 KUKA.SystemSoftware (KSS)。
控制器仍然負責安全監控、跡規劃、過載限制、轉換和能源管理等任務。這些功能和流程將照常在機械手臂控制器上高效安全地運作。
透過乙太網路/現場匯流排建立 KCR 和 PLC 之間的連接。mxAutomation 可支援所有主要製造商:
KRC_MoveLinearAbsolute:直線接近絕對笛卡爾位置
KRC_MoveLinearRelative:以直線運動接近相對笛卡爾位置
KRC_MoveDirectAbsolute:盡快接近絕對笛卡爾位置——PTP 運動
KRC_MoveDirectRelative:盡快接近相對笛卡爾位置——PTP 運動
KRC_MoveAxisAbsolute:盡快接近軸特定位置
KRC_MoveCircAbsolute:以圓周運動接近絕對笛卡爾位置
KRC_MoveCircRelative:以圓周運動接近相對笛卡爾位置
KRC_Jog:在 TOOL 或 BASE 座標系中以點動模式移動以及單軸移動
KRC_DeclareInterrupt:聲明中斷
KRC_ActivateInterrupt:啟用先前聲明的中斷
KRC_DeactivateInterrupt:停用先前聲明的中斷
KRC_ReadInterruptState:讀取中斷狀態
KRC_SetDistanceTrigger:觸發到軌跡點的切換動作
KRC_SetPathTrigger:觸發軌跡相關的切換動作
KRC_ReadDigitalInput:循環和非循環地讀取數位輸入
KRC_ReadDigitalOutput:讀取數位輸出
KRC_WriteDigitalOutput:循環和非循環地寫入數位輸出
KRC_ReadAnalogInput:讀取類比輸入
KRC_ReadAnalogOutput:讀取類比輸出
KRC_WriteAnalogOutput:寫入類比輸出
KRmsgNet:以明文傳輸所有錯誤訊息。切換語言和調整 KRC 的時間
KRC_Error:讀取並確認錯誤狀態
KRC_ReadMXAStatus:讀取 mxA 介面的目前狀態
KRC_ReadMXAError:讀取 mxA 介面的錯誤訊息
KRC_MessageReset:確認 mxA 介面的錯誤訊息
KRC_ReadKRCError:讀取機器人控制器錯誤訊息
KRC_Diag:讀取心跳和診斷訊號
KRC_WriteWorkspace:配置笛卡爾工作空間
KRC_ReadWorkspace:讀取笛卡爾工作空間的配置
KRC_WriteAxWorkspace:配置軸特定工作空間
KRC_ReadAxWorkspace:讀取軸特定工作空間的配置
KRC_ReadWorkstates:讀取工作空間的狀態
您可以搭配使用軟體 KUKA.SafeOperation 減少您系統的空間需求,快速、安全和精簡地進行生產。如此您可以更經濟高效地使用工作單元配置和人機協作。
備註:為了能夠使用這些功能塊,必須在機器人控制器上安裝 KUKA.SafeOperation。
備註:為了能夠使用這些功能塊,必須在機器人控制器上安裝 KUKA.ConveyorTech。
KRC_VectorMoveOn:啟用沿著向量的運動
KRC_VectorMoveOff:停用沿著向量的運動
備註:為了能夠使用這些功能塊,必須在機器人控制器上安裝 KUKA.VectorMove。
KRC_LDDconfig:負載資料確定的配置
KRC_LDDtestRun:執行測試運動以確定較低過程速度的負載資料
KRC_LDDstart:執行負載資料確定
KRC_LDDwriteLoad:將量測值傳輸到特定工具
備註:前提條件是已安裝了 V7.2 以上的 KUKA.LoadDataDetermination。
許多知名製造商均標準提供 mxAutomation PLC function blocks程式庫的 PLC 整合。此外,也可以利用 C++ 或 C# 將 mxAutomation 整合到基於電腦的控制系統中。我們與我們的合作夥伴緊密合作,確保提供最先進的指令和功能,並且可在歐洲、亞洲和美洲使用。
以下系統支援 KUKA.PLC mxAutomation:
- STEP 7 V5.4、S7-300 和 S7-400
- STEP 7 (TIA Portal)、S7-300 和 S7-400
- STEP 7 (TIA Portal)、S7-1500
- TIA Portal (SIMATIC)
- SIMOTION
- SINUMERIK (Run myRobot);見下文