Funzione di KUKA.CNC Sinumerik
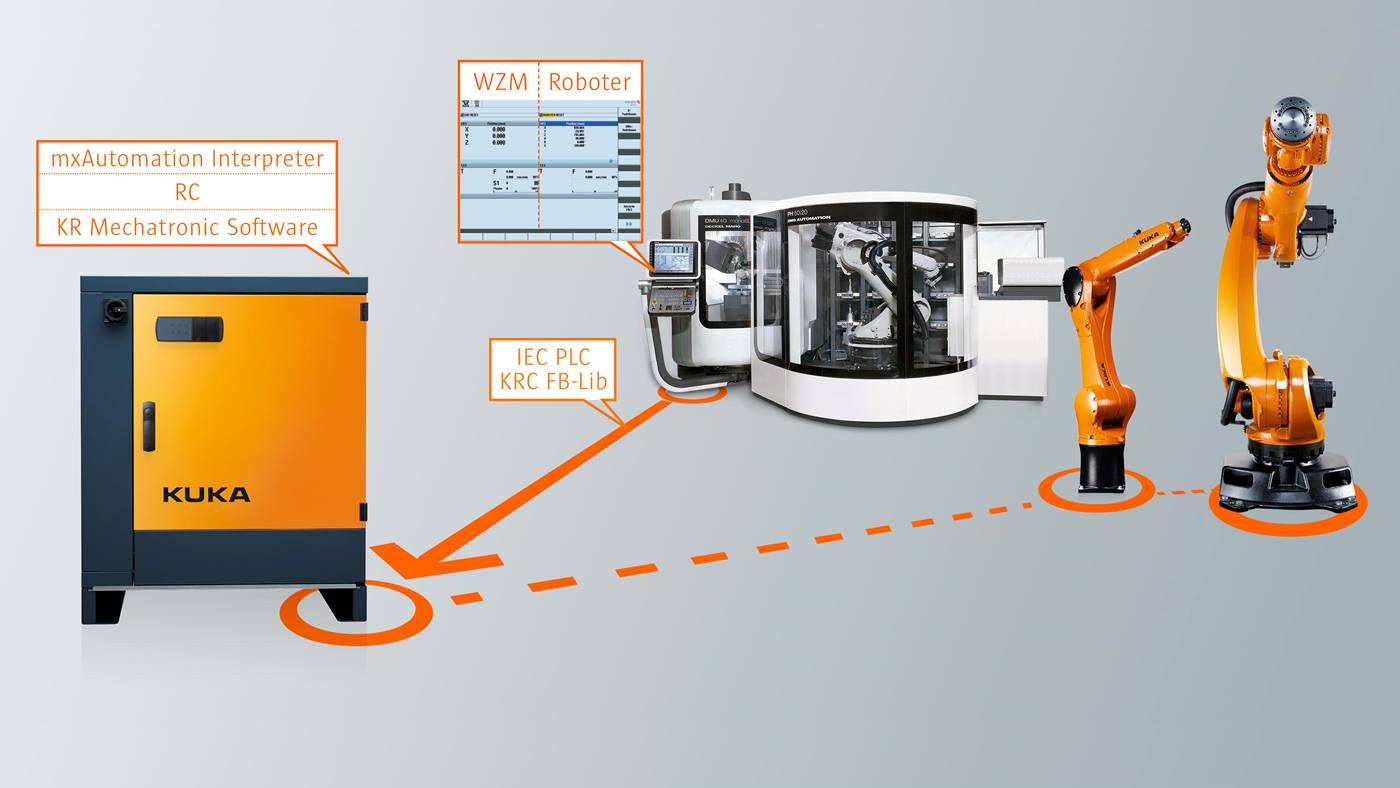
Tramite KUKA.CNC Sinumerik e un’interfaccia Profinet sincronizzata tra un controllo KR C4 e un controllo Siemens Sinumerik 840D sl è possibile gestire e controllare tramite il controllo Sinumerik un qualsiasi robot KUKA.
Il controllo Sinumerik 840D sl assume in questo caso tutte le attività di pianificazione della traiettoria del robot e offre all’operatore CNC abituato a Sinumerik tutte le possibilità note di gestione di un robot KUKA avvalendosi delle funzioni di comando Sinumerik, per esempio la programmazione in codice G e i programmi di ciclo.
Massima precisione di traiettoria grazie a una programmazione intelligente
Sul lato del controllo KUKA vengono inoltre utilizzate tutte le funzioni di comando e azionamento che spostano il robot industriale con la massima precisione possibile sulla sua traiettoria programmata. A tal riguardo, l’interpreter di traiettoria del robot sfrutta un modello dinamico di robot, che fa spostare il robot nel miglior modo possibile nella sua posa attuale. Gli algoritmi KUKA di traiettoria e sicurezza consentono il funzionamento sicuro del robot anche con un controllo Siemens 840D sl.
Vantaggi di KUKA.CNC Sinumerik
- Collegamento robot a sistemi CAM esistenti
- Migliore prestazione di traiettoria del robot
- Comando del robot con conoscenze di CNC
- Soluzione ottimale e standardizzata tramite SINUMERIK Operate
- Facile integrazione dell’impianto nella rete di macchine con funzioni SINUMERIK
Requisiti di sistema per KUKA.CNC Sinumerik
- Controllo robot KR C4
- Interfaccia X63
- Controllo esterno Siemens SINUMERIK 840D sl
- Software KUKA System Software 8.3.9
- WorkVisual 3.0
- PROFINET 3.2