A função do KUKA.CNC Sinumerik
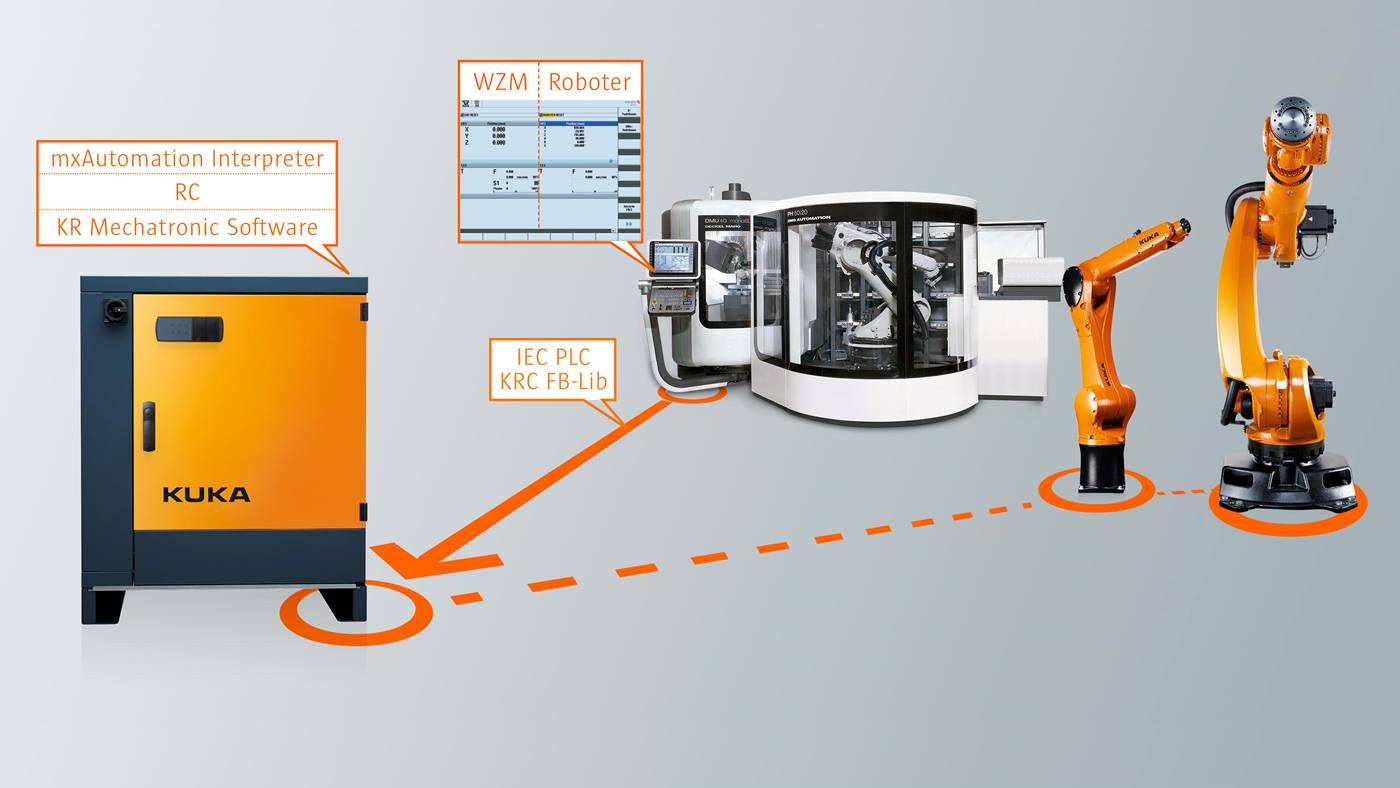
Através do KUKA.CNC Sinumerik e uma interface Profinet sincronizada entre uma unidade de comando KR C4 e uma unidade de comando Siemens Sinumerik 840D sl, é possível operar e comandar qualquer robô KUKA através da unidade de comando Sinumerik.
O Sinumerik 840D sl assume aqui as funções para o planejamento da trajetória do robô e oferece ao operador CNC familiarizado com Sinumerik todas as possibilidades conhecidas para operar um robô KUKA por meio da função de operação Sinumerik – por exemplo, programação G-Code e programas de ciclo.
Máxima precisão de trajetória através de programação inteligente
No lado do comando KUKA continuam a ser usadas todas a funções de comando e acionamento que movem o robô industrial com a máxima precisão possível em sua trajetória programada. O interpretador de trajetória do robô usa para isso um modelo de robô dinâmico, que deixa o robô se deslocar da melhor forma possível em sua posição atual. Os algoritmos de trajetória e Safety da KUKA permitem a operação segura do robô, também em ligação com uma unidade de comando Siemens 840D sl.
Vantagens do KUKA.CNC Sinumerik
- Vinculação do robô a sistemas CAM existentes
- Desempenho de trajetória melhorado do robô
- Operação do robô com conhecimentos CNC
- Solução padronizada ideal através de SINUMERIK Operate
- Integração simples do sistema na rede de máquinas com funções SINUMERIK
Pré-requisitos de sistema para KUKA.CNC Sinumerik
- Unidade de comando do robô KR C4
- Interface X63
- Unidade de comando externa Siemens SINUMERIK 840D sl
- Software KUKA System Software 8.3.9
- WorkVisual 3.0
- PROFINET 3.2