Il robot antropomorfo industriale: cos'è?
Un robot antropomorfo, secondo la definizione dell'Organizzazione Internazionale per la Standardizzazione, è un sistema controllato in modo automatico, multiattivo, versatile e programmabile, composto da tre o più assi. Esistono due tipi di robot: robot cartesiani e robot poliarticolati.
Ogni robot ha le proprie caratteristiche e tecnologie, le più importanti sono la gamma di azioni e la capacità d'ell antropomorfo (robot a 6 assi), che stabilisce i limiti della capacità della macchina. Questi elementi consentono di scegliere il
robot antropomorfo più adatto. È possibile migliorare le prestazioni di un robot con:
assi lineari aggiuntivi,
posizionatori o per movimentarlo con una
piattaforma mobile.
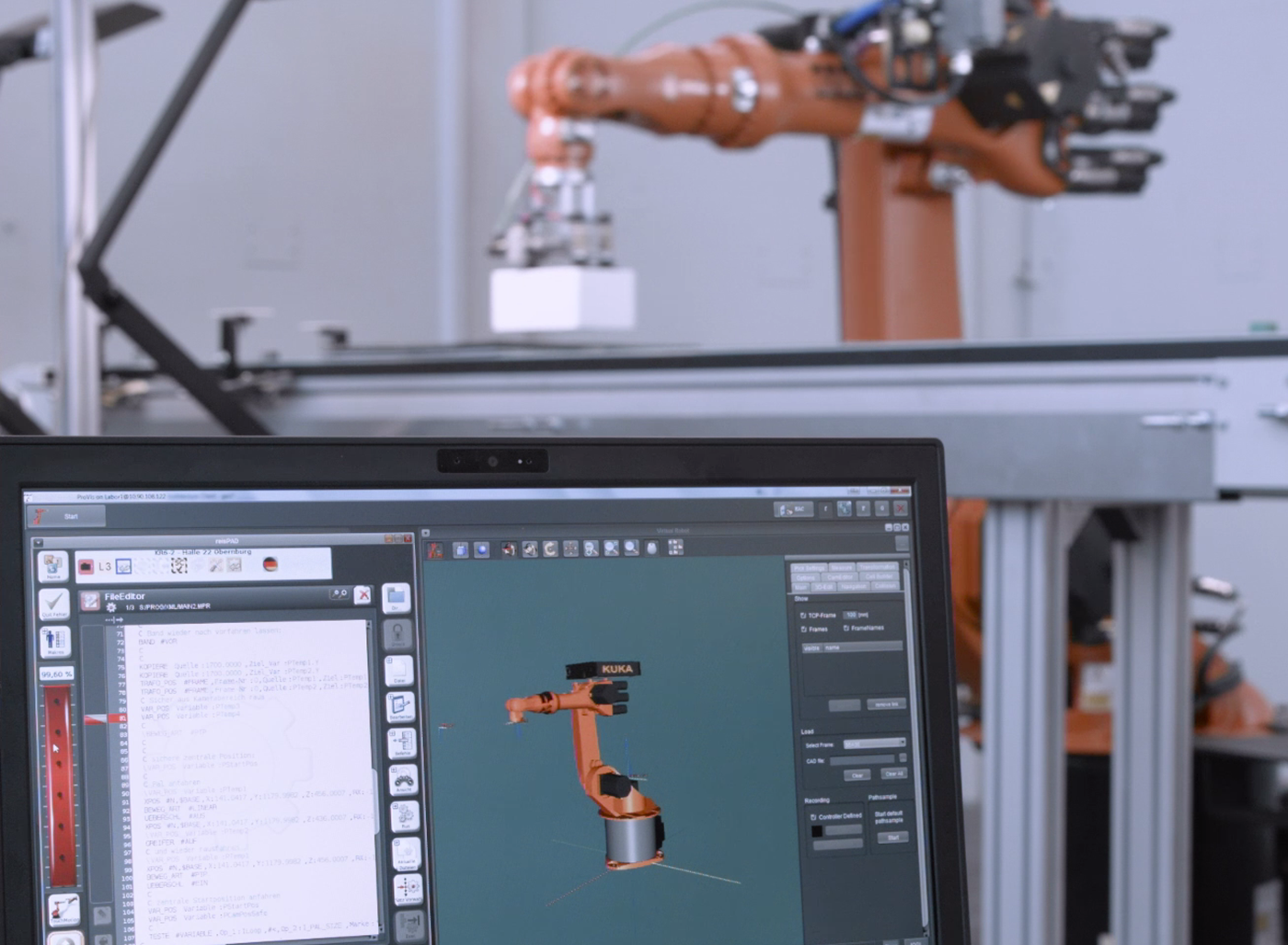
Un sistema robotico ha tre componenti principali:
-
Una parte meccanica: il braccio stesso, composto da motori su ciascun asse.
-
Una parte elettronica: l'armadio di controllo con l'unità centrale che assicura il servocontrollo, i sensori e i variatori di velocità.
-
Una parte informatica: sotto forma di un linguaggio di programmazione software specifico che permette di controllare il robot antropomorfo collegandolo all'utente e all'ambiente. Questa parte del computer comprende un calcolatore che converte i dati codificati del motore in valori cartesiani.
Qual è lo scopo di un robot antropomorfo?
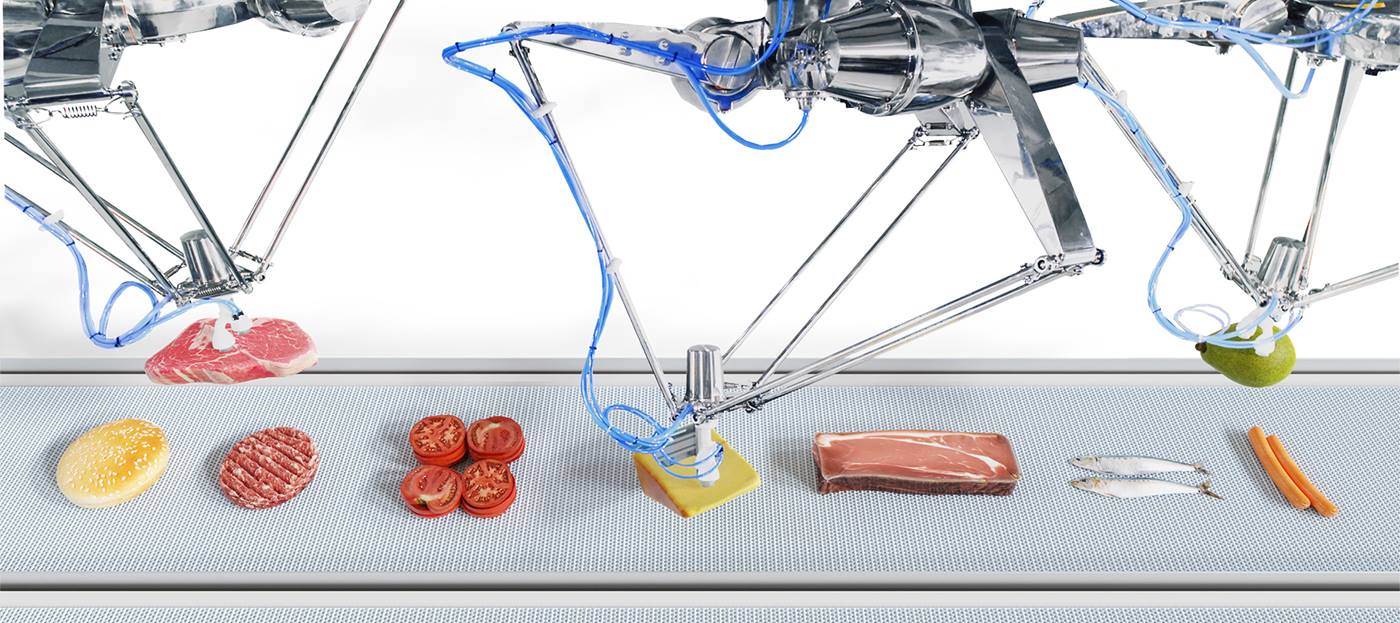
Le applicazioni per le automazioni delle macchine, processi o linee manifatturiere complete, vedono la robotica al centro dell' operatività. L'antropomorfo impiegato dall’azienda diviene spesso lo strumento principale in qualsiasi settore industriale come quello automobilistico, alimentare, elettronico, metallurgico, della produzione di materie plastiche ma anche nel settore medico. Il robot è adatto a diverse funzioni a seconda delle sue caratteristiche essenziali e dello strumento di cui dispone. Le applicazioni principali nelle quali vengono usate le macchine sono:
Vantaggi di utilizzo
I robot industriali offrono un'elevata velocità di esecuzione, in un ambiente di produzione, superiore a quella umana e una precisione duratura nel tempo. Considerando i livelli elevati di accuratezza degli antropomorfi, i robot sono in grado di realizzare produzioni di alta qualità e di eseguire processi più precisi e affidabili. Un'elevato profilo dei prodotti si traduce in una riduzione dei tempi di controllo della qualità per determinare se i prodotti sono conformi agli standard desiderati.
L'uso della tecnologia di automazione comporta quindi numerosi vantaggi:
- Miglioramento della resa
- Massimizzazione della fabbricazione dei prodotti
- Ottimizzazione della qualità
- Precisione quasi perfetta e ripetibile
- Riduzione dei rischi per i dipendenti
- Miglioramento delle condizioni di lavoro: meno RSI
- Certezza della coerenza del ritmo e del processo robotizzato
- Maggiore flessibilità
Come scegliere il miglior sistema robotico?
Il robot migliore è quello che risponde meglio alle esigenze specifiche del cliente e del suo progetto di produzione. A tal fine, è importante conoscere alcuni criteri chiave, poiché esistono diversi tipi di robot:
-
Il compito da automatizzare
-
Il raggio d'azione richiesto
-
Il carico (il peso del pezzo da trasportare...)
-
Il tempo ciclo indicato dall'azienda
-
L'ambiente di lavoro
Quando si integra un robot industriale antropomorfo, un robot tradizionale o uno collaborativo, la sicurezza è una necessità e quindi è essenziale eseguire un'analisi del grado di rischio in anticipo. Soprattutto i cobot che lavorano nello stesso ambiente dell'uomo, per combinare le capacità umane con le automazioni del processo, richiedono molte precauzioni di sicurezza. Una volta che avete in mente questi aspetti, potete effettuare una ricerca o utilizzare questo strumento che calcolerà il robot più adatto alle vostre esigenze.
In alternativa, potete contattare direttamente i nostri esperti per un servizio di assistenza personalizzato. In breve, non esiste il robot perfetto, ma esistono bracci robotici per tutte le situazioni e applicazioni.