Robot: identiteitskaart
Een industriële robot, zoals gedefinieerd door de Internationale Organisatie voor Normalisatie, is een automatisch bestuurd, multi-actief, veelzijdig systeem dat op drie of meer assen kan worden geprogrammeerd. Er zijn twee types: Cartesische robots en poly-gearticuleerde robots.
Elke robot heeft zijn eigen kenmerken. De belangrijkste daarvan zijn het actiebereik oftewel reach en het maximale draagvermogen oftewel payload, die de grenzen van de actie van de machine bepalen. Deze elementen maken de keuze voor de meest geschikte
industriële robot mogelijk. Het is mogelijk om de prestaties van een robot te verbeteren met extra assen zoals
lineaire assen of
positioneerders. Je kan de robot ook verplaatsen met een
mobiel platform.
Een robotsysteem bestaat uit drie grote onderdelen:
- Een mechanisch deel: de arm zelf, met motoren op elke as.
- Een elektronisch gedeelte: de sturingskast met zijn centrale eenheid die de servosturing verzorgt, zijn sensoren en snelheidsregelaar.
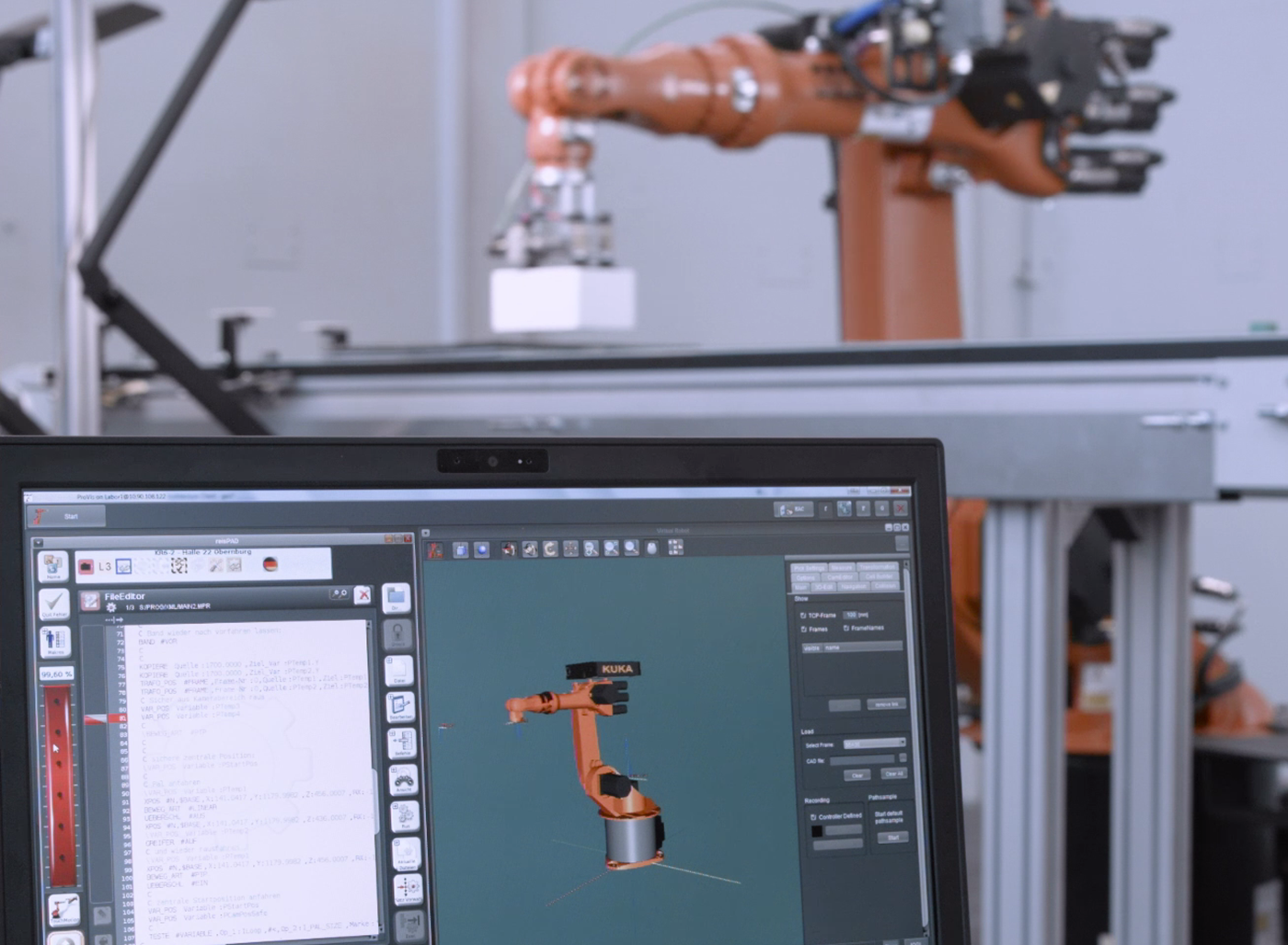
- Een computergedeelte: in de vorm van een specifieke programmeertaal waarmee de robot kan worden bestuurd door hem te koppelen aan zijn gebruiker en zijn omgeving. Dit computergedeelte omvat een rekenmachine die de gecodeerde motorgegevens omzet in Cartesische waarden
Wat is het doel van een industriële robot?
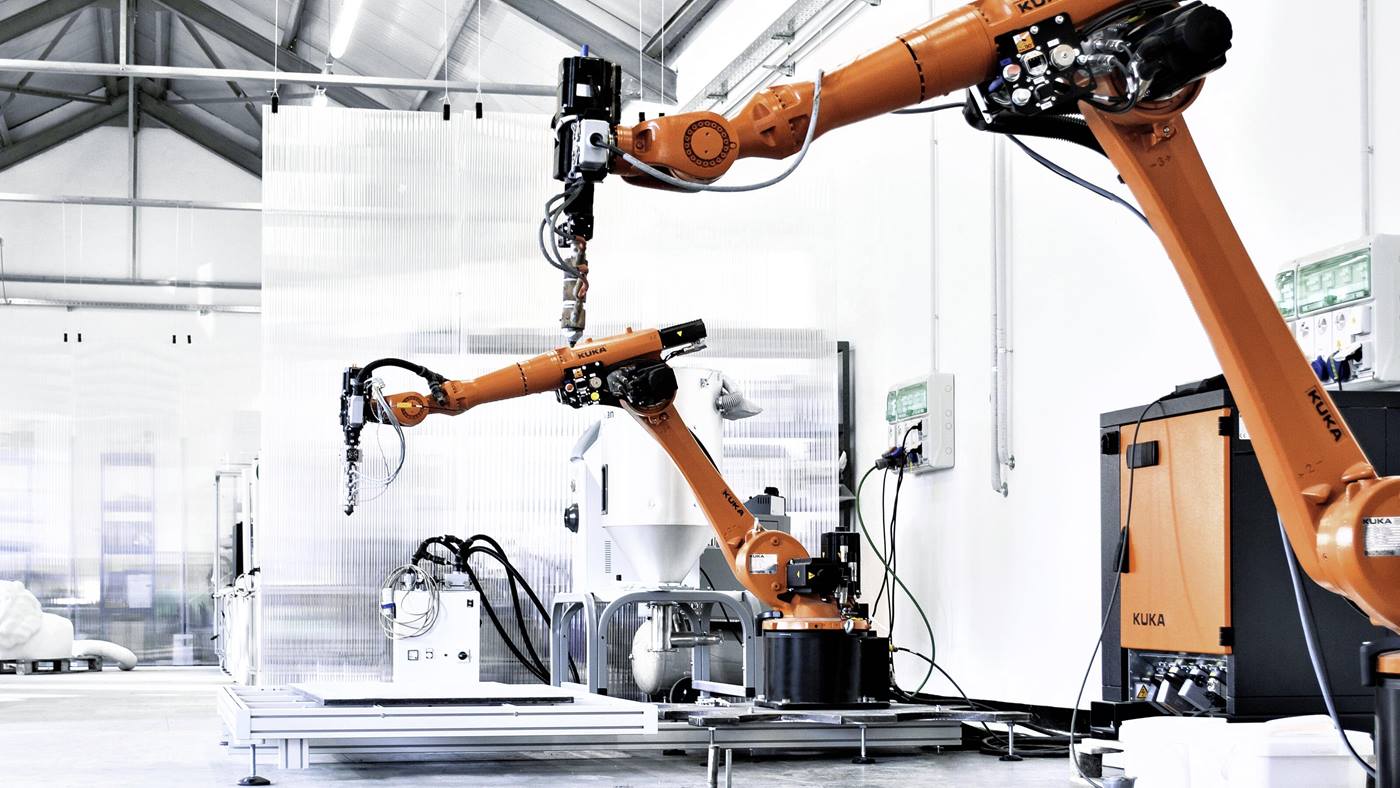
Robotica is een belangrijk hulpmiddel in tal van industrieën, zoals de automobielsector, de consumptiegoederenindustrie, de elektronica, de metallurgie, de kunststoffenindustrie en ook in de medische sector. Robotica is geschikt voor verschillende toepassingen, afhankelijk van zijn intrinsieke kenmerken en het gereedschap waarover hij beschikt. De voornaamste toepassingen zijn:
Gebruiksvoordelen
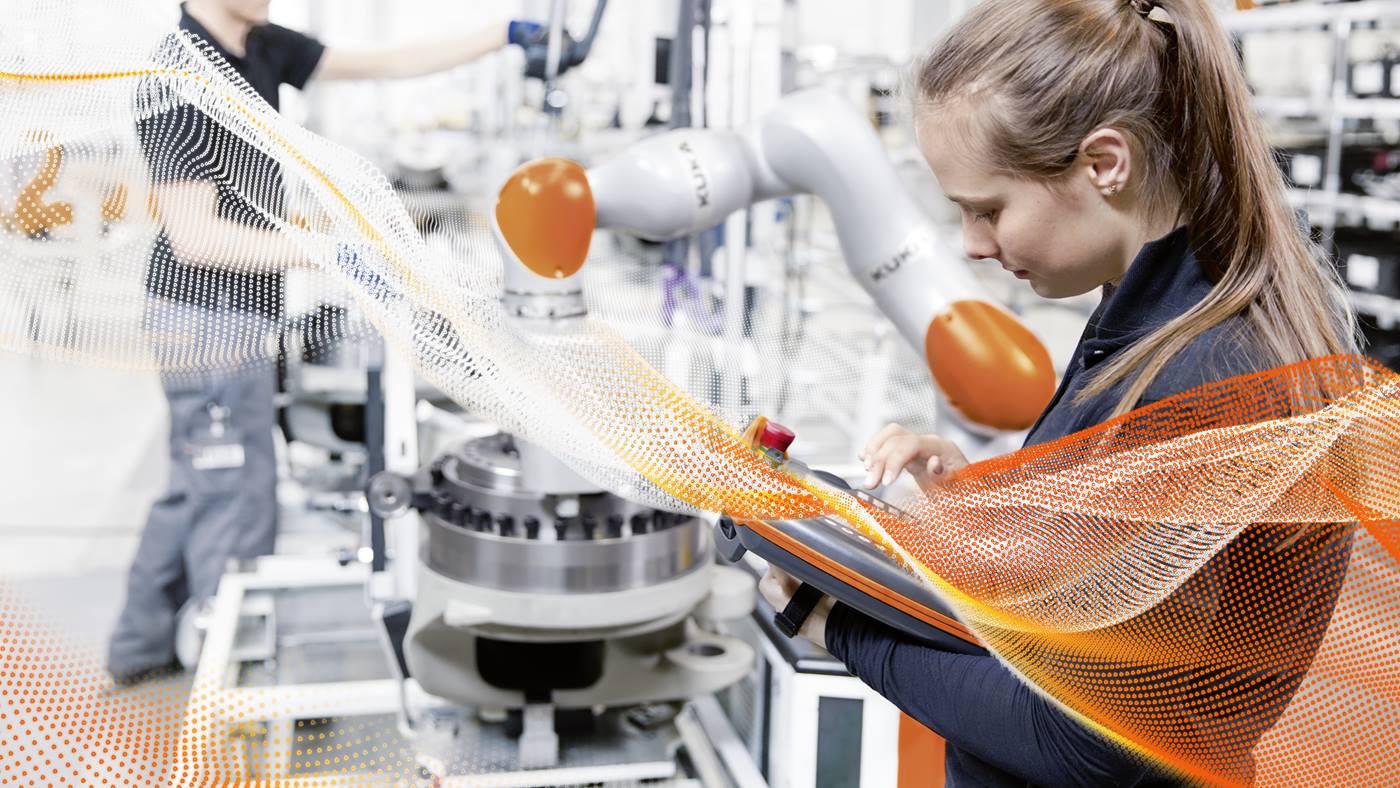
Industriële robotica zorgt voor een snellere uitvoering dan mensen en een herhaalbare precisie in een bepaalde tijd. Ze zijn eenvoudig te programmeren en helpen bedrijven om concurrentieel te blijven. Voor veel bedrijven biedt het dus tal van nieuwe mogelijkheden. De voornaamste voordelen voor robotica zijn:
- Verbeterde efficiëntie
- Maximalisatie van de productie
- Optimalisatie van kwaliteit
- Bijna perfecte en herhaalbare precisie
- Vermindering van risico's voor werknemers
- Betere arbeidsomstandigheden: minder RSI
- Gegarandeerde snelheid en werkwijze
- Grotere flexibiliteit
Hoe kies je de meest geschikte robot?
De beste robot is de robot die het meest geschikt is bij de specifieke behoeften van een project. Hiervoor is het belangrijk enkele essentiële criteria te kennen:
- De te automatiseren taak
- De vereiste reikwijdte of reach
- De belasting of payload(het gewicht van het te transporteren onderdeel...)
- De cyclustijd
- De werkomgeving
Bij de integratie van een robot, conventioneel of collaboratief, is veiligheid een eerste vereiste en is het van essentieel belang vooraf een risicoanalyse uit te voeren. Zodra u deze elementen in gedachten hebt, kunt u opzoekingen doen of een tool gebruiken die voor u de robot berekent die het best aan uw behoeften beantwoordt.
U kunt ook rechtstreeks contact opnemen met onze experts voor ondersteuning op maat. Kortom, er bestaat niet zoiets als de beste robot, maar er bestaan robotarmen voor alle situaties en alle toepassingen.