Korzystasz ze starszej wersji przeglądarki Internet Explorer. Aby zapewnić optymalnie działanie, zaktualizuj przeglądarkę
KUKA.RobotSensorInterface
Oprogramowanie służy jako interfejs do komunikacji pomiędzy robotem przemysłowym a jego systemem czujników i umożliwia proste, uniwersalne i efektywne programowanie wymagających aplikacji czujników.
KUKA.RobotSensorInterface (RSI) to pakiet technologiczny z oprogramowaniem służącym do realizacji aplikacji, które wymagają cyklicznego przetwarzania sygnałów i wydajnego, cyklicznego oddziaływania na ruch robota, na przykład podczas szlifowania, polerowania, gratowania i wielu innych zastosowań.Pakiet technologiczny RSI zawiera zarówno narzędzia inżynierskie niezbędne do tworzenia aplikacji, jak i komponenty oprogramowania służące do sterowania robotem przemysłowym, które są niezbędne do uruchomienia i wykonania aplikacji.
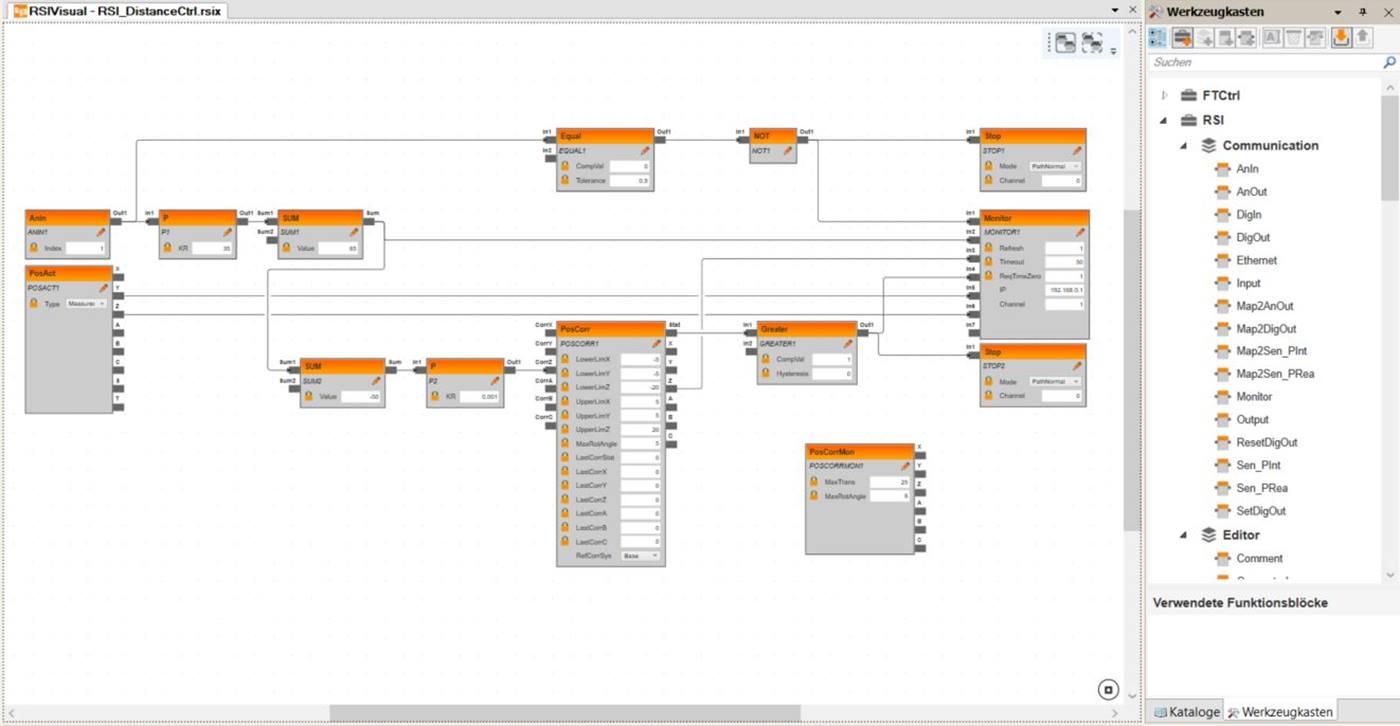
RSIVisual Editor – łatwe programowanie graficzne
Za pomocą edytora graficznego RSIVisual można w bardzo prosty sposób zaprogramować przetwarzanie sygnałów niezwykle czułej aplikacji. Za pomocą obiektów RSI ze skrzynki narzędziowej RSI można wczytywać i przetwarzać cykliczne wartości pomiarowe z podłączonych czujników. Wynik może zostać wykorzystany do wpływania na ruch robota. Edytor posiada wiele funkcji, między innymi:
Tworzenie własnych bloków funkcyjnych
Realizacja dowolnej funkcji
Kompletne programowanie poprzez RSIVisual zintegrowane w WorkVisual Engineering Suite
Toolbox z ponad 75 obiektami RSI do programowania graficznego
Dzięki czujnikowi odległości, zamontowanemu na kołnierzu robota, można na przykład utrzymywać żądaną odległość od powierzchni podzespołu niezależnie od zaprogramowanego toru.
Bezproblemowa integracja i łatwy podgląd złożonych aplikacji – zalety:
Łatwa integracja
Znajomość programowania nie jest wymagana
Proste programowanie graficzne za pomocą RSIVisual
Współpraca z niemal wszystkimi robotami KUKA i osiami zewnętrznymi
Bezproblemowa integracja z KUKA.ForceTorqueControl w aplikacjach RSI
Możliwość stosowania również w produkcji taśmowej
Najwyższa wydajność
Przetwarzanie w czasie rzeczywistym w ciągu 4 ms
Wielofunkcyjny interfejs
Bezproblemowa integracja z KUKA.WorkVisual
Spełnimy wszystkie Twoje wymagania
Integracja z KUKA.RobotSensorInterface znacznie rozszerza zakres aplikacji Twojego robota przemysłowego. Przesyłanie danych robota i aplikacji w czasie rzeczywistym do systemu zewnętrznego.
Zalety
Szlifowanie i gratowanie
Dokładne gratowanie i szlifowanie podzespołów
Manipulacja
Sterowanie robotem za pomocą joysticka
Spawanie
Śledzenie spoiny spawalniczej na podstawie danych z procesu spawania
Montaż
Łączenie podzespołów z regulacją siły
Polerowanie
Pomiar stosowanej siły i sterowanie torem robota w czasie rzeczywistym
Kontrola i przegląd
Precyzyjna kontrola jest bardzo przydatna dla różnych rodzajów produktów, takich jak: fotele, kierownice, przełączniki, dźwignie i przyciski
Przesyłanie danych
Przesyłanie danych robota i aplikacji w czasie rzeczywistym do systemu zewnętrznego
Stwórz swoją własną „aplikację” dla czujnika!
Wykorzystaj swoje know-how do realizacji procesów z pomocą KUKA.RobotSensorInterface w połączeniu z KUKA.WorkVisual Engineering Suite i edytorem KUKA.Optionpackageeditor, aby zaoferować swoim klientom rozwiązanie w postaci pełnowartościowej „aplikacji” KUKA.
Wszystkie najważniejsze informacje zawsze na wyciągnięcie ręki
Aby uzyskać dostęp do różnych wersji i dokumentacji lub sprawdzić dostępność RSI, odwiedź KUKA Marketplace. Zarejestruj się szybko na stronie my.KUKA i uzyskaj natychmiastowy dostęp do wszystkich informacji.