používate yastaralú verziu prehliadačaInternet Explorer. prosím zaktualizujte prehliadač na novšiu verziu
KUKA.RobotSensorInterface
Softvér slúži ako komunikačné rozhranie medzi priemyselným robotom a jeho snímačovým systémom a umožňuje jednoduché, univerzálne a efektívne programovanie náročných aplikácií snímača.
KUKA.RobotSensorInterface (RSI) je softvérový technologický balík na realizáciu aplikácií, ktoré si vyžadujú cyklické spracovanie signálov a vysokovýkonné cyklické ovplyvňovanie pohybu robota, ako je brúsenie, leštenie, odhrotovanie a mnoho ďalších.Technologický balík RSI obsahuje inžinierske nástroje potrebné na vývoj aplikácie a softvérové komponenty na ovládanie priemyselného robota, ktoré sú potrebné na uvedenie aplikácie do prevádzky a jej spustenie.
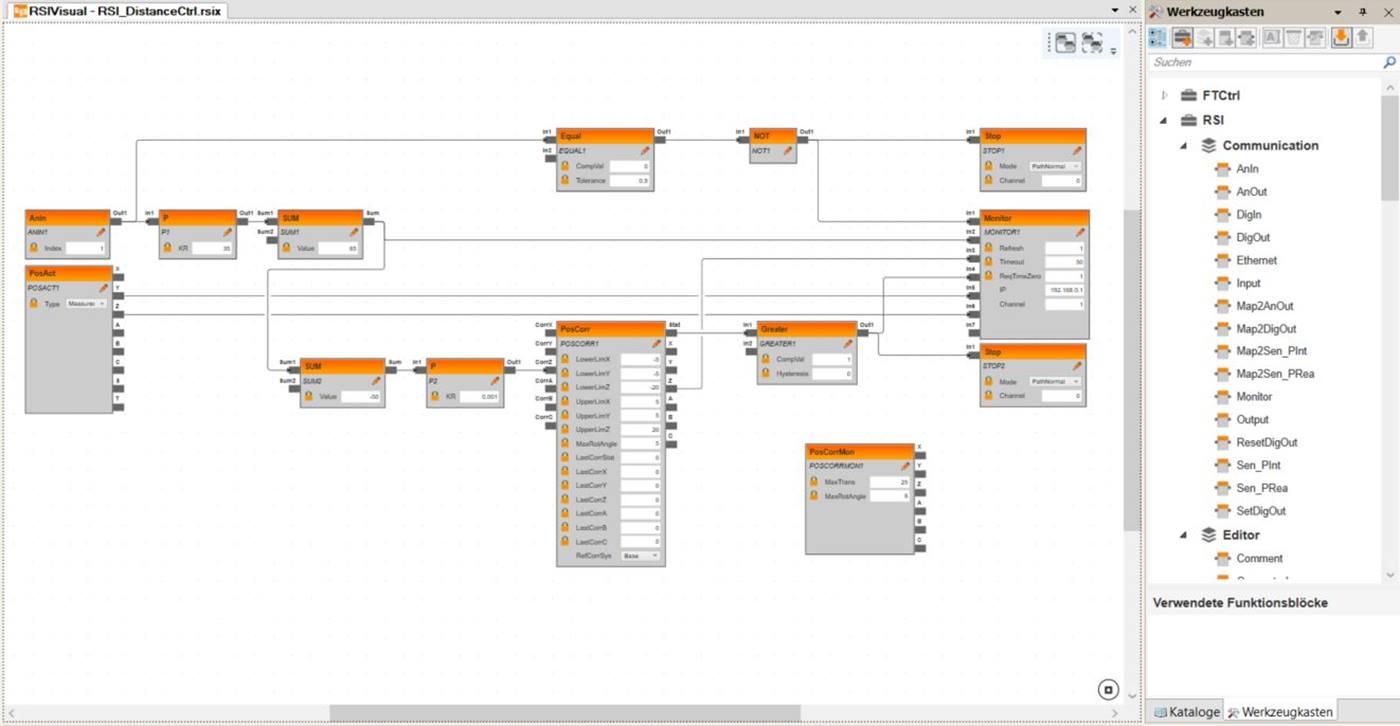
RSIVisual Editor – Jednoduché grafické programovanie
Pomocou grafického editora RSIVisual možno veľmi jednoducho naprogramovať spracovanie signálu citlivej aplikácie. Pomocou objektov RSI zo súpravy nástrojov RSI možno načítať a ďalej spracovať cyklicky namerané hodnoty z pripojených snímačov. Výsledok možno použiť na ovplyvnenie pohybu robota. Editor má rôzne funkcie, a to vrátane týchto funkcií:
Vytváranie vlastných funkčných blokov
Realizácia všetkých požadovaných funkcií
Kompletné programovanie prostredníctvom RSIVisual integrovaného do WorkVisual Engineering Suite
Súbor s nástrojmi s viac ako 75 objektmi RSI na grafické programovanie
Napríklad pomocou snímača vzdialenosti na prírube robota možno dodržať požadovanú vzdialenosť od povrchu konštrukčného nezávisle od naprogramovanej dráhy.
Hladká integrácia a jednoduchý prehľad o vašich komplexných aplikáciách – vaše výhody:
Jednoduchá integrácia
Nevyžadujú sa žiadne znalosti programovania
Jednoduché grafické programovanie pomocou RSIVisual
Pracuje s takmer všetkými robotmi KUKA a externými osami
Bezproblémová integrácia s KUKA.ForceTorqueControl v aplikáciách RSI
Môže sa používať aj pri výrobe na montážnej linke
Najlepší výkon vo svojej triede
Spracovanie v reálnom čase do 4 ms
Multifunkčné rozhranie
Bezproblémová integrácia v KUKA.WorkVisual
Pokrývame všetky vaše požiadavky
Integrácia KUKA.RobotSensorInterface mnohonásobne rozšíri možnosti použitia vášho priemyselného robota. Priemyselný robot sa dá použiť takmer v každej oblasti, od manipulácie cez montáž až po kontrolu.
Výhody
Brúsenie a odhrotovanie
Rozmerovo presné odhrotovanie a brúsenie komponentov
Manipulácia
Ovládanie robota pomocou pákového ovládača
Zváranie
Sledovanie zvarového spoja na základe údajov z procesu zvárania
Montáž
Silou riadené spájanie komponentov
Leštenie
Meranie pôsobiacej sily a riadenie trajektórie robota v reálnom čase
Kontrola a inšpekcia
Hmatové testovanie je veľmi užitočné pre rôzne typy výrobkov: sedadlá, volanty, spínače, páčky a tlačidlá
Prenos údajov
Prenos údajov z robota a aplikácie do externého systému v reálnom čase
Vytvorte si vlastnú „aplikáciu“ pre snímače!
Využite svoje know-how na riešenie procesov a KUKA.RobotSensorInterface v spolupráci s inžinierskym balíkom KUKA.WorkVisual a KUKA.Optionpackageeditor a ponúknite svoje riešenie zákazníkom ako plnohodnotnú „aplikáciu“ KUKA.
Systémové požiadavky pre KUKA.RobotSensorInterface
Všetky dôležité informácie máte vždy na dosah ruky
Ak chcete získať prehľad o rôznych verziách a dokumentáciách alebo skontrolovať dostupnosť RSI, navštívte KUKA Marketplace. Zaregistrujte sa rýchlo na my.KUKA a získajte okamžitý prístup k všetkým informáciám.