현재 이전 브라우저 버전의 Internet Explorer를 사용하고 계십니다. 최적화된 보기를 위해 브라우저를 업데이트해 주십시오.
KUKA.RobotSensorInterface
이 소프트웨어는 산업용 로봇과 센서 시스템 간의 통신을 위한 인터페이스 역할을 하며, 간단하고 보편적이며 효과적인 방식으로 까다로운 센서 애플리케이션의 프로그래밍을 가능하게 합니다.
로봇 센서 인터페이스는 까다로운 센서 애플리케이션을 단순화
KUKA.RobotSensorInterface(RSI)는 연삭, 연마, 디버링 등과 같이 주기적 신호 처리와 로봇 움직임의 고성능 주기적 영향을 필요로 하는 애플리케이션을 구현하기 위한 소프트웨어 기술 패키지입니다.RSI 기술 패키지에는 애플리케이션을 개발하는 데 필요한 엔지니어링 도구와 산업용 로봇을 제어하기 위한 애플리케이션을 시운전 및 실행하는 데 필요한 소프트웨어 구성 요소가 모두 포함되어 있습니다.
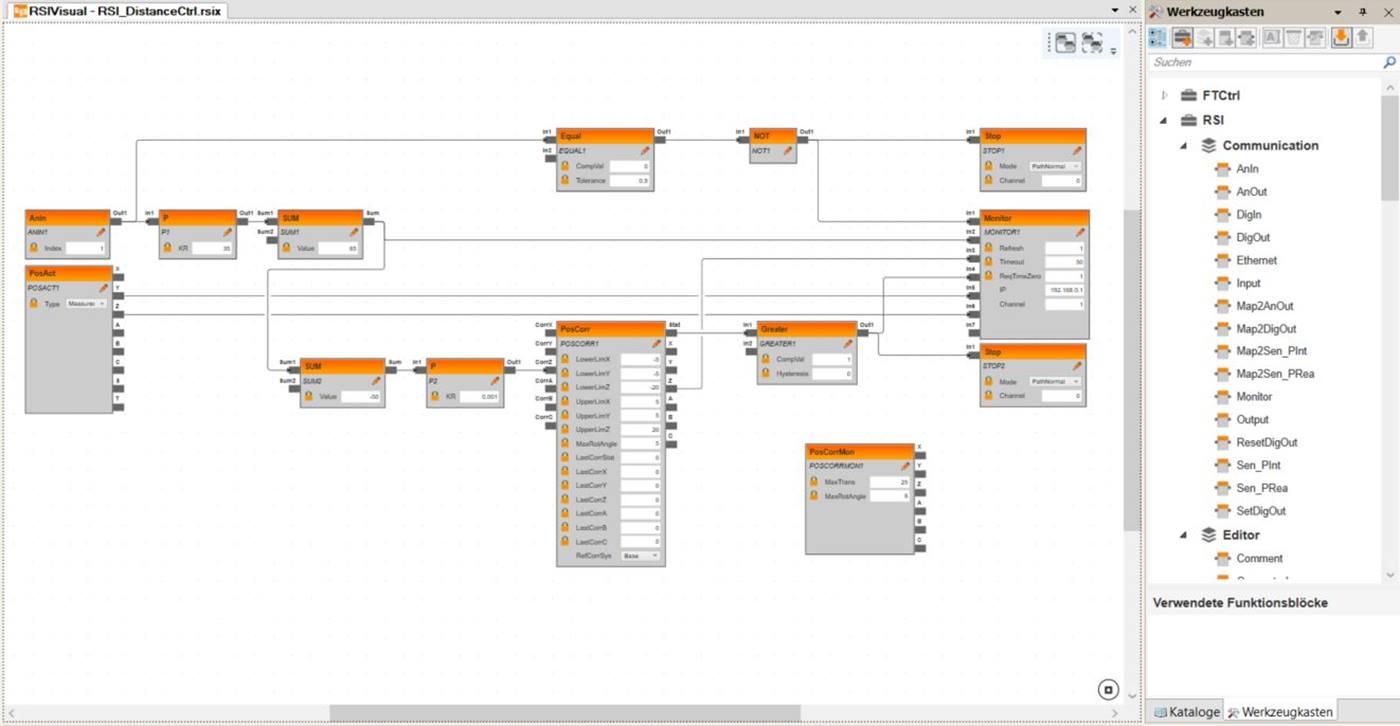
RSIVisual 편집기 - 손쉬운 그래픽 프로그래밍
그래픽 편집기 RSIVisual을 민감한 애플리케이션의 신호 처리를 매우 간단하게 프로그래밍할 수 있습니다. 연결된 센서에서 주기적으로 측정된 값을 판독하고 RSI 도구 상자의 RSI 개체를 사용하여 추가로 처리할 수 있습니다. 결과는 로봇의 움직임에 영향을 미치기 위해 사용할 수 있습니다. 편집기에는 다음과 같은 다양한 기능이 있습니다.
고유한 기능 블록 생성
원하는 기능 구현
WorkVisual Engineering Suite에 통합된 RSIVisual을 통한 완전한 프로그래밍
그래픽 프로그래밍을 위한 75개 이상의 RSI 개체가 있는 도구 상자
로봇 플랜지의 거리 센서를 사용하면 예를 들어 프로그래밍된 경로에 관계없이 원하는 구성 요소 표면까지의 거리를 유지할 수 있습니다.
KUKA.RobotSensorInterface의 통합은 산업용 로봇의 응용 분야를 몇 배로 확장할 것입니다. 핸들링에서 조립, 검사에 이르기까지 산업용 로봇을 거의 모든 분야에서 사용할 수 있습니다.
장점
연삭 및 디버링
구성 요소의 정확한 디버링 및 연삭
핸들링
조이스틱을 통한 로봇 제어
웰딩
용접 공정의 데이터를 기반으로 한 용접 이음부 추적
조립
구성 요소의 힘 제어식 결합
연마
실시간으로 가해지는 힘을 측정하고 로봇의 경로를 제어
테스트 및 검사
촉각 테스트는 다양한 유형의 제품에 매우 유용합니다. 시트, 스티어링 휠, 스위치, 레버, 버튼
데이터 전송
로봇 및 애플리케이션에서 외부 시스템으로 실시간 데이터 전송
고유한 센서 “앱”을 만들어 보십시오!
귀하의 노하우를 공정 솔루션으로 활용하고 KUKA.RobotSensorInterface를 Engineering Suite KUKA.WorkVisual 및 KUKA.Optionpackageeditor와 함께 사용하십시오. 그리고 완전한 KUKA “앱”으로 고객에게 솔루션을 제공하십시오.