You are using Internet Explorer and will not be able to use our website properly. Please change to an up-to-date browser for ideal presentation of the website.
KUKA.RobotSensorInterface
The software serves as an interface for communication between the industrial robot and its sensor system and enables the programming of sophisticated sensor applications in a simple, universal and effective manner.
KUKA.RobotSensorInterface (RSI) is a software technology package for implementing applications that require cyclical signal processing as well as high-performance, cyclical influence over the robot motion, including grinding, polishing, deburring and much more. The RSI technology package includes both the engineering tools needed to develop the application and the software components required for application start-up and execution and for controlling the industrial robot.
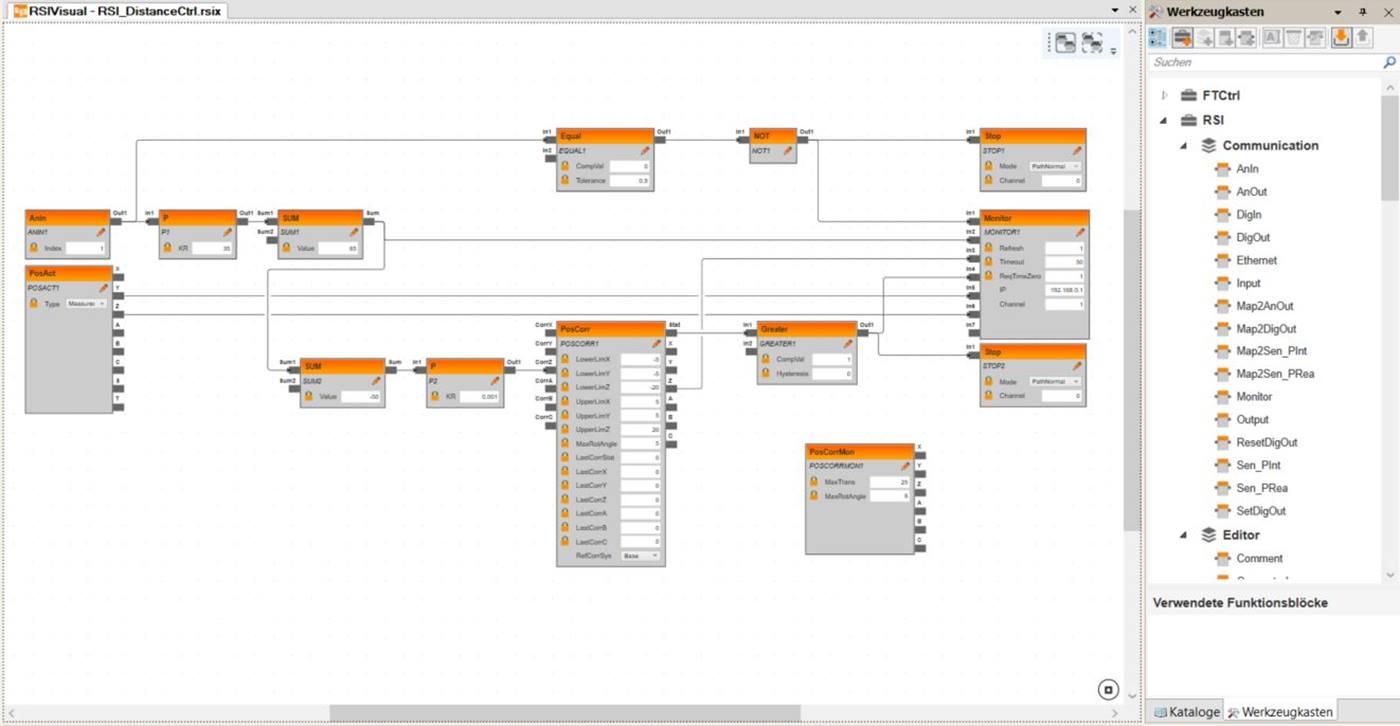
The RSIVisual graphical editor makes it very easy to program the signal processing of a sensitive application. The cyclical measured values of connected sensors can be read and processed further via the RSI objects from the RSI toolbox. The result can be used to influence the robot motion. The editor has a wide range of functions, including:
Creation of user-defined function blocks
Implementation of any desired functionality
Complete programming via RSIVisual integrated into WorkVisual engineering suite
Toolbox with over 75 RSI objects for graphical programming
With a distance sensor on the robot flange, for example, a desired distance from a component surface can be maintained independently of the programmed path.
Trouble-free integration and easy overview of your complex applications – your advantages:
Works with nearly all KUKA robots and external axes
Seamless integration with KUKA.ForceTorqueControl in RSI applications
Can also be used in assembly line production
Best-in-class performance
Real-time processing within 4 ms
Multi-functional interface
Seamless integration into KUKA.WorkVisual
We have all your requirements covered
The integration of KUKA.RobotSensorInterface vastly expands the range of applications of your industrial robot. From handling to assembly and on to inspection, your industrial robot can be used in almost any application.
Advantages
Grinding & deburring
Precisely tailored deburring and grinding of components
Handling
Control of the robot with a joystick
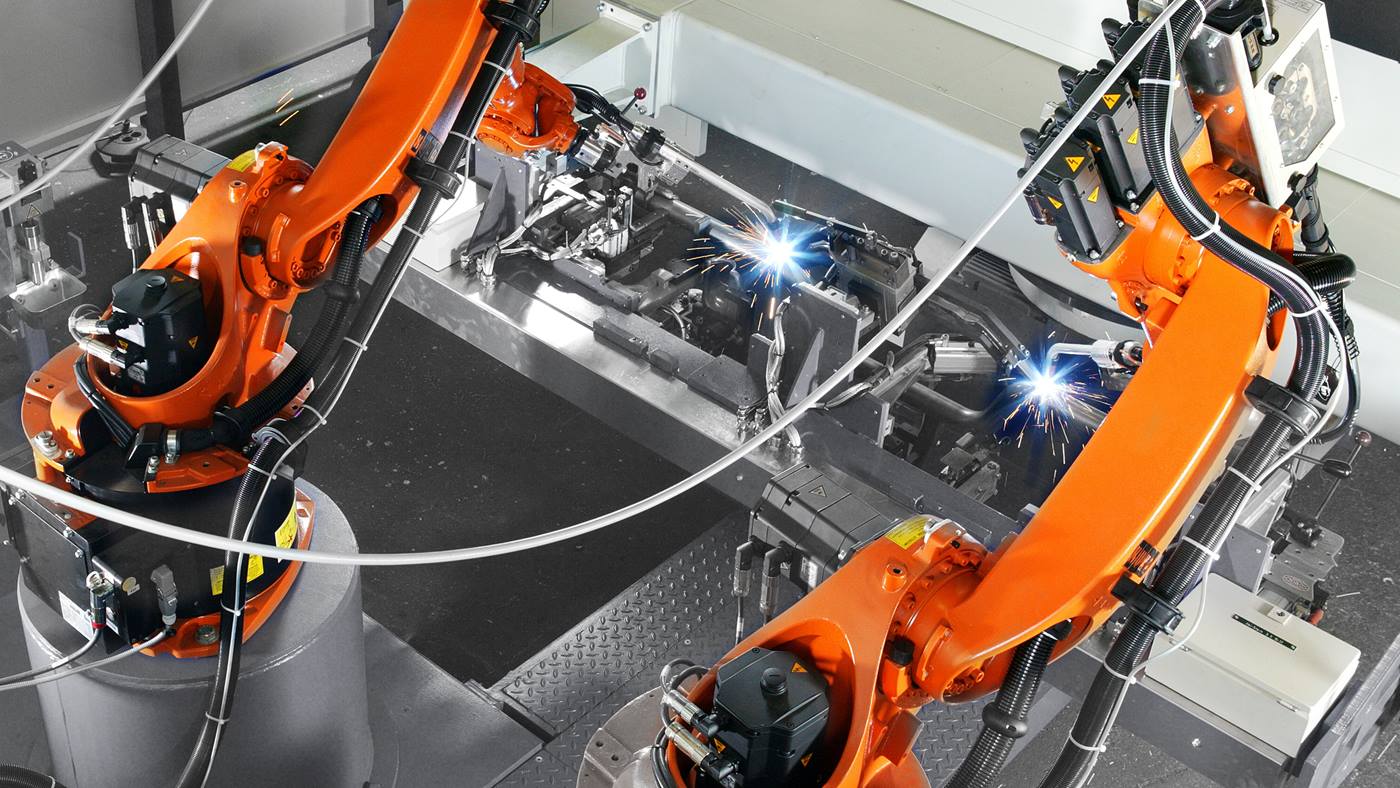
Welding
Seam tracking based on the data from the welding process
Assembly
Force-controlled joining of components
Polishing
Measurement of applied force and control of robot path in real time
Testing & inspection
Tactile testing is very useful for various types of products: seats, steering wheels, switches, levers and buttons
Data transmission
Real-time transmission of data from the robot and the application to an external system
Create your own sensor “app”!
Leverage your know-how for process solutions as well as KUKA.RobotSensorInterface in conjunction with the KUKA.WorkVisual engineering suite and KUKA.OptionPackageEditor. Then offer your solution to your customers as a fully-fledged KUKA “app”.
To get an overview of the different versions and documentation or to check the availability of RSI, visit the KUKA Marketplace. Quickly register at my.KUKA and get instant access to all information.