อินเตอร์เฟสเซ็นเซอร์หุ่นยนต์ช่วยลดความยุ่งยากของการใช้งานเซ็นเซอร์ที่มีความท้าทาย
KUKA.RobotSensorInterface (RSI) เป็นแพ็กเกจเทคโนโลยีซอฟต์แวร์สำหรับการใช้งานที่ต้องมีการประมวลผลสัญญาณแบบวนซ้ำและมีประสิทธิภาพสูง รวมถึงมีอิทธิพลในลักษณะวงจรต่อการเคลื่อนไหวของหุ่นยนต์ เช่น การเจียร การขัดเงา การลบคม และอื่นๆ อีกมากมาย แพ็กเกจเทคโนโลยี RSI ประกอบด้วยเครื่องมือทางวิศวกรรมที่จำเป็นต่อการพัฒนาการใช้งานและส่วนประกอบซอฟต์แวร์ที่จำเป็นต่อการทดสอบและดำเนินการใช้งานสำหรับการควบคุมหุ่นยนต์อุตสาหกรรม
RSIVisual Editor - การตั้งโปรแกรมกราฟิกได้อย่างง่ายดาย
ด้วย Editor RSIVisual แบบกราฟิกสามารถตั้งโปรแกรมการประมวลผลสัญญาณของการใช้งานที่มีความละเอียดอ่อนได้ด้วยวิธีที่ง่ายมาก เมื่อใช้วัตถุ RSI จากกล่องเครื่องมือ RSI จะสามารถอ่านและประมวลผลค่าที่วัดได้ในลักษณะวนซ้ำของเซ็นเซอร์ที่เชื่อมต่ออยู่ได้ ผลที่ได้คือสามารถใช้ค่าดังกล่าวเพื่อควบคุมการเคลื่อนไหวของหุ่นยนต์ได้ ตัวแก้ไขมีฟังก์ชันจำนวนมาก ซึ่งรวมไปถึงฟังก์ชันต่างๆ เหล่านี้ด้วย
-
การสร้างฟังก์ชันบล็อกของตนเอง
-
การใช้งานฟังก์ชันที่ต้องการ
-
การตั้งโปรแกรมอย่างสมบูรณ์ผ่าน RSIVisual ที่รวมอยู่ใน WorkVisual Engineering Suite
-
กล่องเครื่องมือมีวัตถุ RSI กว่า 75 รายการสำหรับการตั้งโปรแกรมแบบกราฟิก
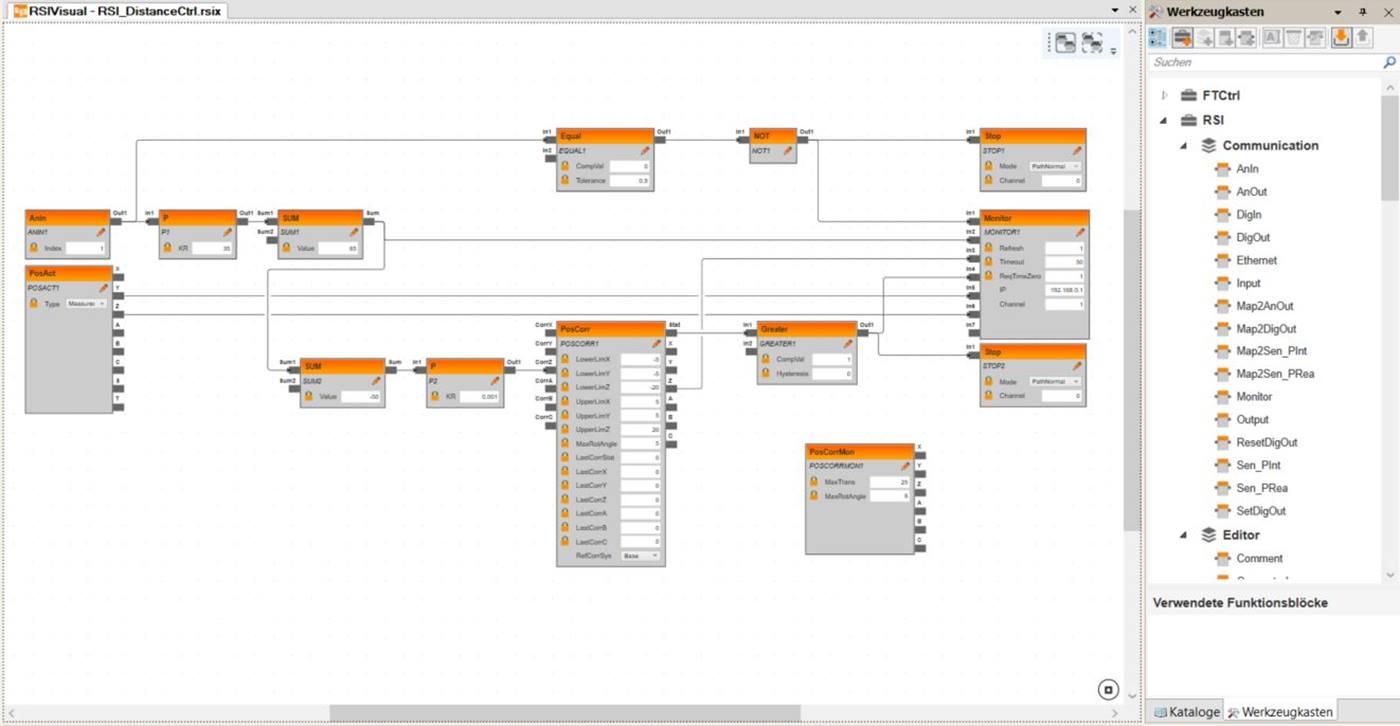 ด้วยเซ็นเซอร์วัดระยะทางที่หน้าแปลนหุ่นยนต์ช่วยให้สามารถรักษาระยะห่างไปยังพื้นผิวส่วนประกอบที่ต้องการได้โดยไม่ขึ้นกับเส้นทางที่ตั้งโปรแกรมไว้ เป็นต้น
ด้วยเซ็นเซอร์วัดระยะทางที่หน้าแปลนหุ่นยนต์ช่วยให้สามารถรักษาระยะห่างไปยังพื้นผิวส่วนประกอบที่ต้องการได้โดยไม่ขึ้นกับเส้นทางที่ตั้งโปรแกรมไว้ เป็นต้น
เราครอบคลุมทุกความต้องการของคุณ
การผสานรวม KUKA.RobotSensorInterface จะเป็นการขยายการใช้งานให้กับหุ่นยนต์อุตสาหกรรมของคุณอีกหลายเท่าตัว คุณจะพบว่าหุ่นยนต์สำหรับการใช้งานของคุณสามารถใช้งานได้เกือบทุกด้านตั้งแต่การจัดการ การประกอบ ไปจนถึงการตรวจสอบ
สร้าง “แอป” เซ็นเซอร์ของคุณเอง!
ใช้ความรู้ของคุณในการแก้ปัญหากระบวนการและ KUKA.RobotSensorInterface ที่ร่วมกับ Engineering Suite
KUKA.WorkVisual และ KUKA.Optionpackageeditor แล้วนำเสนอโซลูชันของคุณให้กับลูกค้าในฐานะ “แอป” ของ KUKA ที่สมบูรณ์
ข้อกำหนดด้านระบบสำหรับ KUKA.RobotSensorInterface