RobotSensorInterfaceが難しいセンサーアプリケーションを簡単に
KUKA.RobotSensorInterface(RSI、ロボットセンサーインターフェース)はソフトウェアテクノロジーパッケージであり、周期的な信号処理や、例えば 研削、研磨、バリ取りなど、その他多くの工程でのロボット動作への周期的な干渉を必要とする高性能なアプリケーションを実現します。RSIテクノロジーパッケージには、アプリケーションの開発に必要なエンジニアリングツール、ならびにアプリケーションの試験操作と実行に必要な、産業用ロボット制御用のソフトウェアコンポーネントが含まれています。
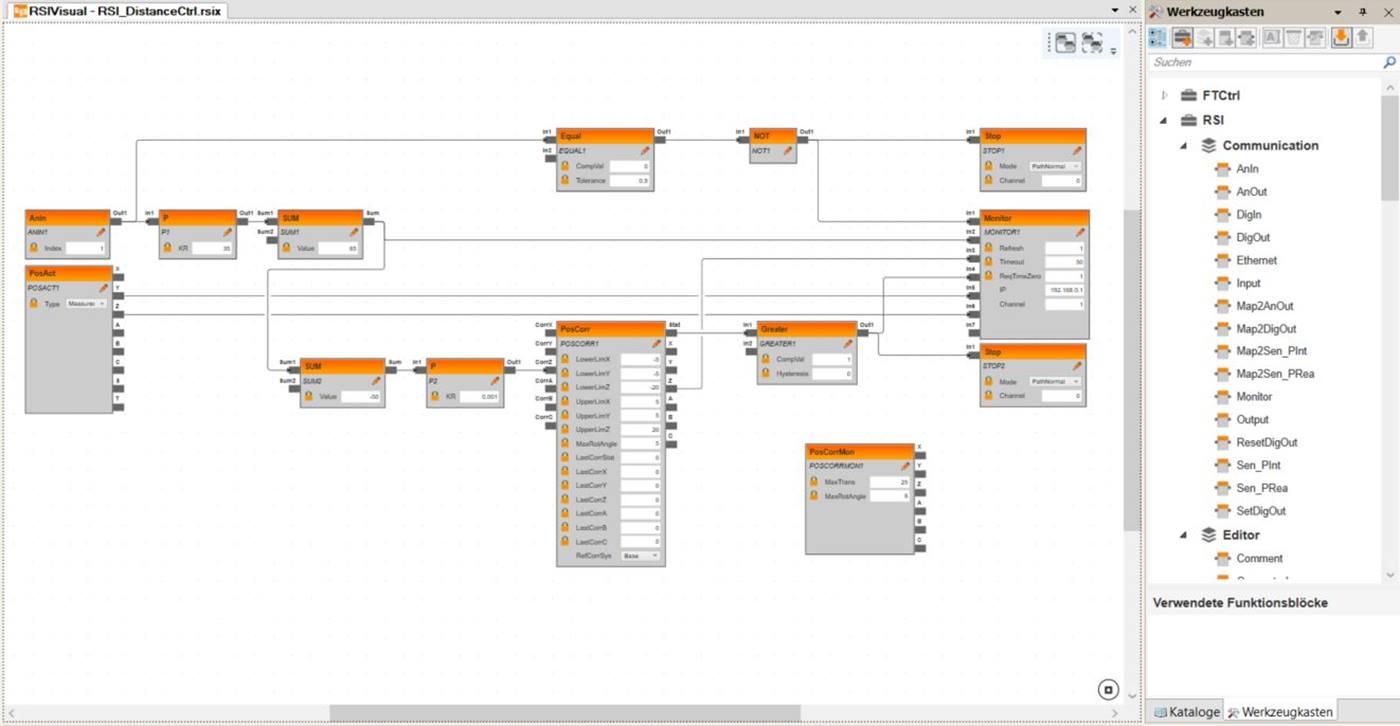
RSIVisualエディタ ― 簡単なグラフィカルプログラミング
RSIVisualグラフィックエディターを使えば、デリケートなアプリケーションの信号処理を極めてシンプルに、プログラミングすることが可能です。RSIツールボックスのRSI対象物を使用して、接続されたセンサーからの周期的な測定値を読み込んで処理することができます。得られた結果をもとに ロボットの動作に影響を与えることができます。エディタが持つ多数の機能の一部として、以下のものがあります:
 ロボットフランジに距離センサーを接続することで、例えば部品表面までの任意の距離を、プログラミングされた軌道とは関係なく維持することができます。
ロボットフランジに距離センサーを接続することで、例えば部品表面までの任意の距離を、プログラミングされた軌道とは関係なく維持することができます。
あらゆるご要望にお応えします
KUKA.RobotSensorInterfaceの統合は、産業用ロボットの用途を何倍にも広げてくれるでしょう。ハンドリングから組み立て、そして検査まで、産業用ロボットはほとんどすべての分野に応用できます。
オリジナルのセンサーアプリ(App)をぜひ設定してください!
あなたのノウハウを製造工程のソリューションに、また
KUKA.WorkVisual エンジニアリング・スイートとKUKA.オプションパッケージエディタが連携して動作するKUKA.RobotSensorInterfaceのソリューションにお役立てください。そしてお客様にご満足いただけるKUKAアプリとしてそのソリューションをご提供ください。
KUKA.RobotSensorInterfaceのシステム前提条件