Herkennen, structureren, grijpen: zo functioneert bin picking
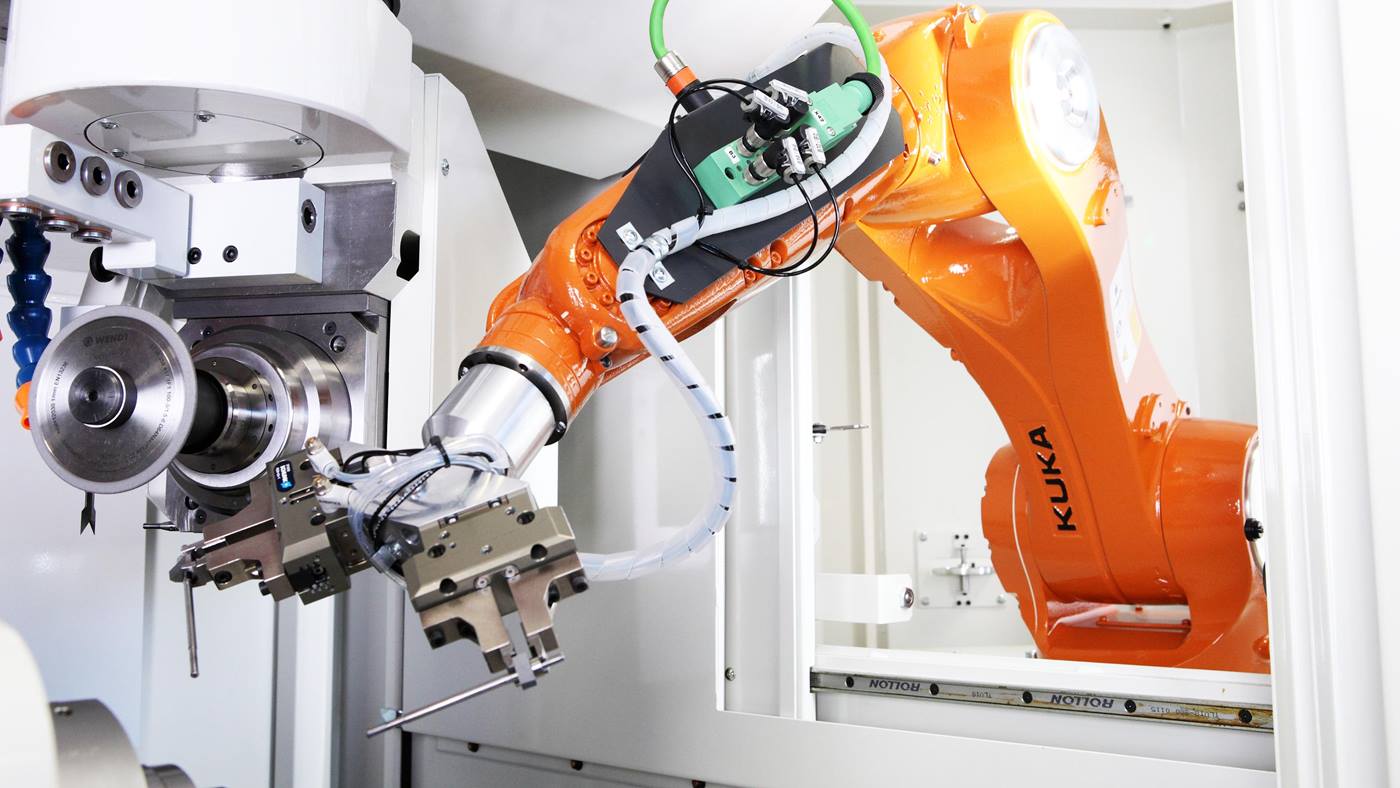
Betrouwbaar onderdelen uit een kist halen, zonder daarbij tegen de recipiënt te stoten: Met het technologiepakket KUKA.SmartBinPicking is dat nu geautomatiseerd mogelijk. De software maakt, in combinatie met de Vision-herkenning van Roboception, botsings- en singulariteitsvrij grijpen van onderdelen uit een doos mogelijk met bijvoorbeeld een zesassige robot KR AGILUS, KR CYBERTECH of KR IONTEC.
Ongeordende onderdelen geen probleem
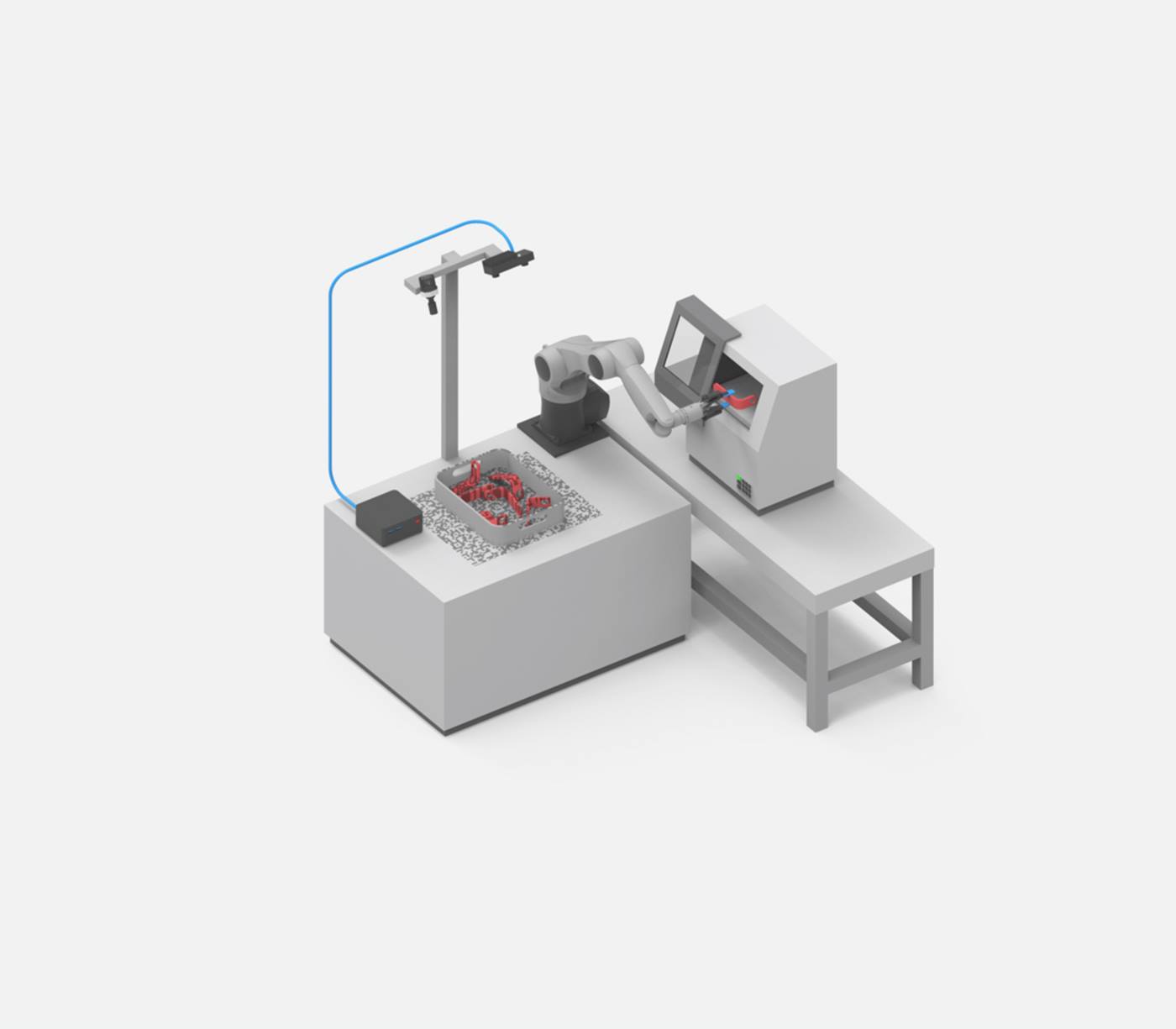
Door de 3D-camera worden de willekeurig geplaatste objecten herkend en geprioriseerd. Dit betekent: de software structureert welk onderdeel het best kan worden gegrepen en legt daardoor een optimale volgorde vast. De geïntegreerde baanplanning berekent de botsingsvrije weg voor de bin picking, inclusief alle hoeken, om elk onderdeel uit de kist te grijpen. Door te grijpen met de vijfde as, d.w.z. de robothand, zijn veel preciezere hoeken mogelijk.
vrije baan voor automatisering en Industrie 4.0
Terwijl de robot met een zeer precieze greep een onderdeel uit de doos haalt, wordt tegelijk al de volgende baan gepland. Dat verkort de cyclustijden. De beeldverwerking van de 3D-camera en de baanplanning worden uitgevoerd op een externe industriële pc, waarop een KUKA plug-in is geïnstalleerd. De klant hoeft zich daarover echter geen zorgen te maken, want hij krijgt een kant-en-klaar softwarepakket. Dan geldt alleen nog: vrije baan voor grijpen in de kist en intelligente bin picking
Welke rol speelt kunstmatige intelligentie bij de objectherkenning?
Om grijpen in de kist en intelligente picking zo goed mogelijk voor te bereiden, wordt een CAD-model in een fotorealistische simulatieomgeving geladen. Daar wordt het systeem getraind en wordt het beeld door een omvangrijke bibliotheek, bijvoorbeeld wat betreft kleurreacties en verlichtingsvoorwaarden, geoptimaliseerd voor alle eisen. Dit geautomatiseerde proces kan 's nachts lopen, zodat de robotica-toepassing de volgende dag kan worden gebruikt.