Recunoaștere, structurare, înțelegere: Așa funcționează colectarea automată a pieselor
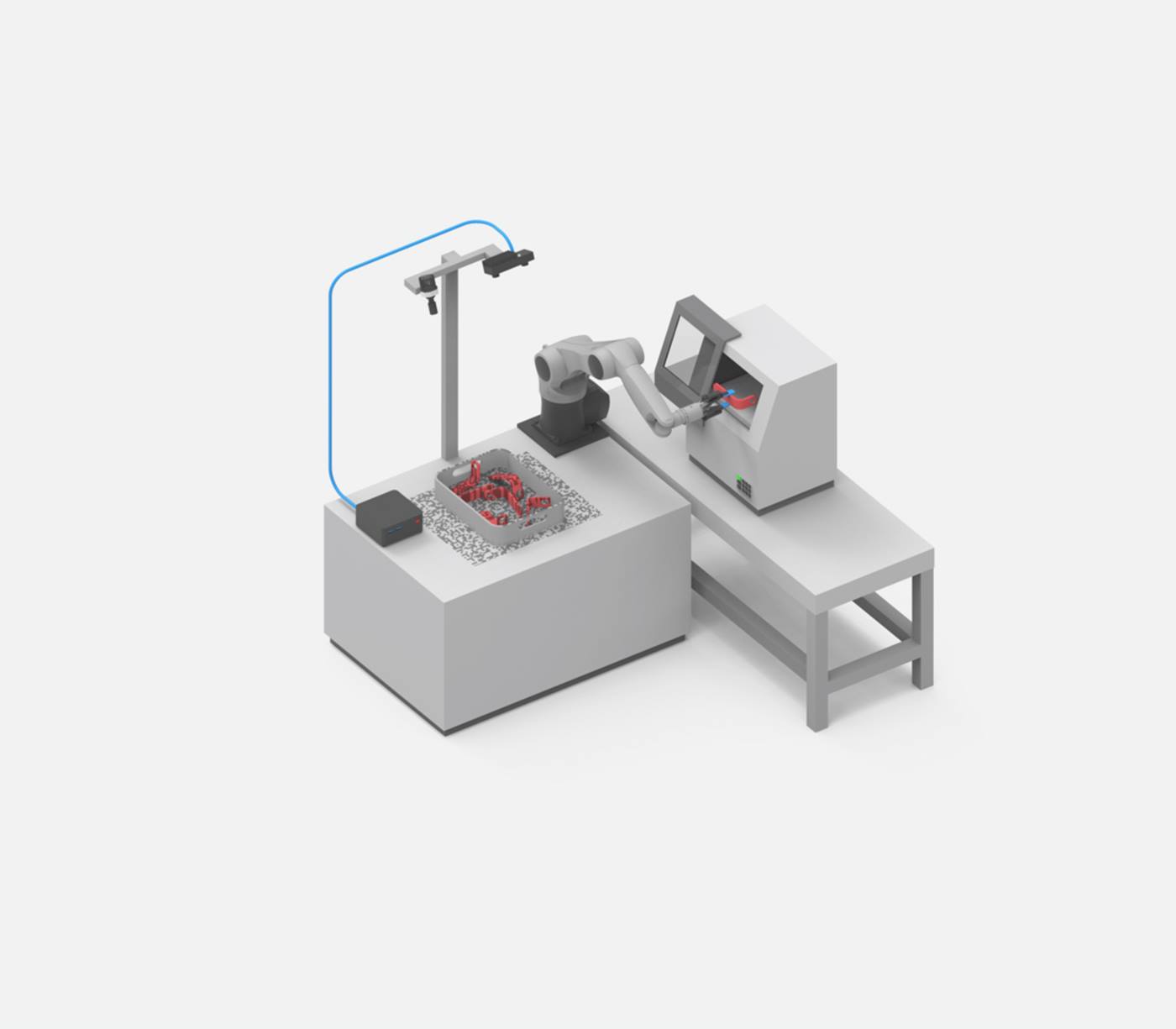
Extragerea fiabilă a pieselor dintr-un container fără coliziune cu containerul se poate face acum în mod automat cu ajutorul pachetului tehnologic KUKA.SmartBinPicking. Software-ul combinat cu recunoașterea vizuală de la Roboception permite extragerea fără coliziuni și fără singularități a pieselor dintr-un container de către un robot cu șase axe KR AGILUS, KR CYBERTECH sau KR IONTEC, de exemplu.
Piesele neordonate nu reprezintă o provocare
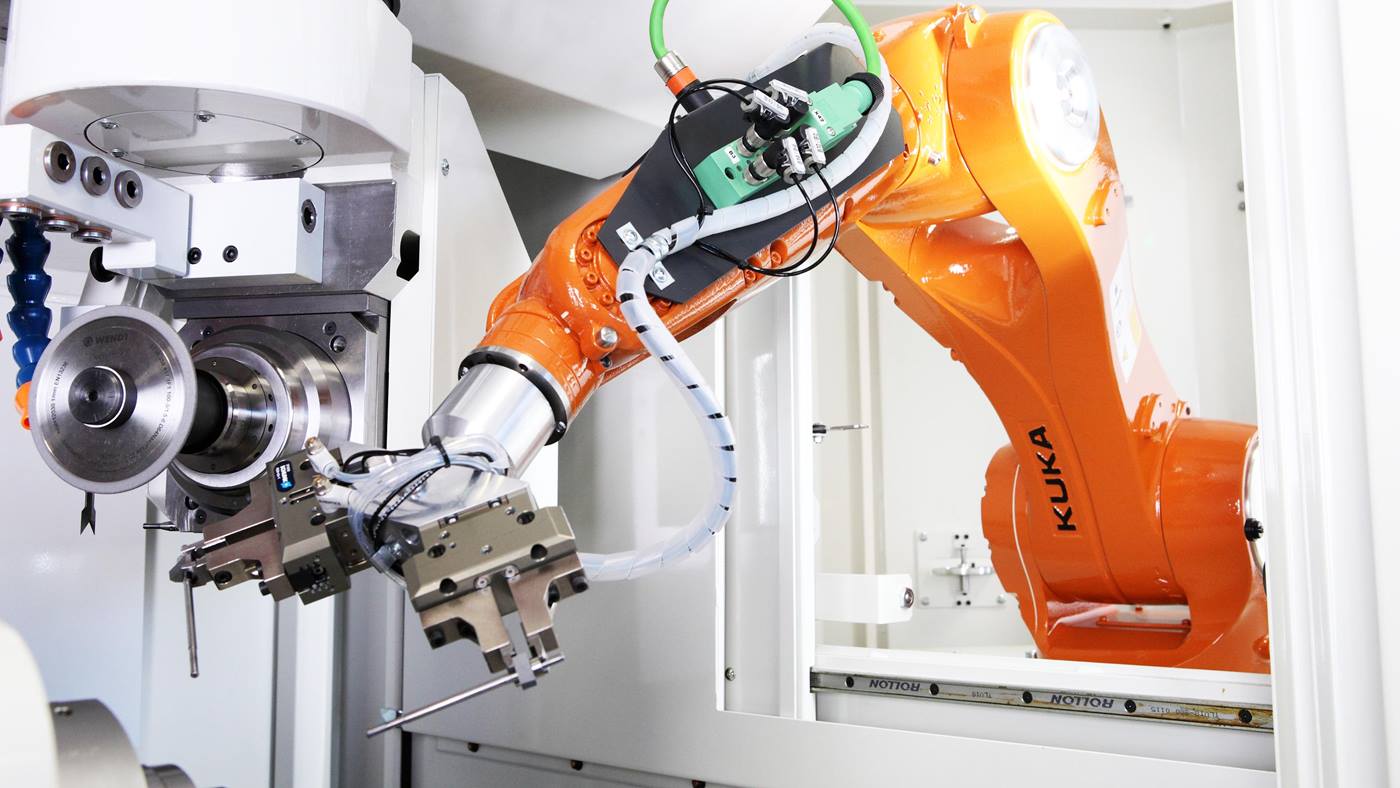
Camera 3D detectează și acordă prioritate obiectelor dispuse aleatoriu. Altfel spus: Software-ul structurează ce piesă ar trebui să fie prinsă și determină astfel o secvență optimă. Planificarea integrată a traseului calculează traseul fără coliziuni pentru colectarea automată a pieselor, inclusiv toate unghiurile, pentru extragerea una câte una a pieselor din container. Prin prinderea cu a cincea axă, adică mâna robotului, sunt posibile unghiuri mult mai precise.
Faceți loc automatizării și industriei 4.0
În timp ce robotul extrage o piesă din container cu o prindere extrem de precisă, următoarea mișcare este deja planificată în paralel. Acest lucru scurtează durata ciclurilor. Prelucrarea imaginilor camerei 3D și planificarea traseului se realizează pe un PC industrial extern, pe care este instalat un plug-in KUKA. Dar clientul nu trebuie să-și facă griji în această privință, deoarece primește un pachet software gata de funcționare.
Ce rol joacă inteligența artificială în recunoașterea obiectelor?
Pentru a pregăti cât mai bine posibil prinderea și colectarea automată a pieselor, un model CAD este încărcat într-un mediu de simulare foto-realistă. Acolo, sistemul este antrenat și imaginea este optimizată pentru a îndeplini toate cerințele cu ajutorul unei biblioteci extinse, de exemplu în ceea ce privește reacțiile cromatice și condițiile de iluminare. Acest proces automatizat poate funcționa peste noapte, astfel încât aplicația robotizată să poată fi utilizată a doua zi.