Detectar, estruturar, apanhar: Assim funciona o Bin Picking
Apanhar peças de forma confiável de uma caixa, sem bater no contentor: Isso agora é possível de forma automatizada com o pacote de tecnologia KUKA.SmartBinPicking. O software, combinado com a detecção Vision da Roboception, permite apanhar peças de uma caixa, sem colisão e singularidade, p.ex., através de um robô de seis eixos KR AGILUS, KR CYBERTECH ou KR IONTEC.
Componentes não ordenados não representam um desafio
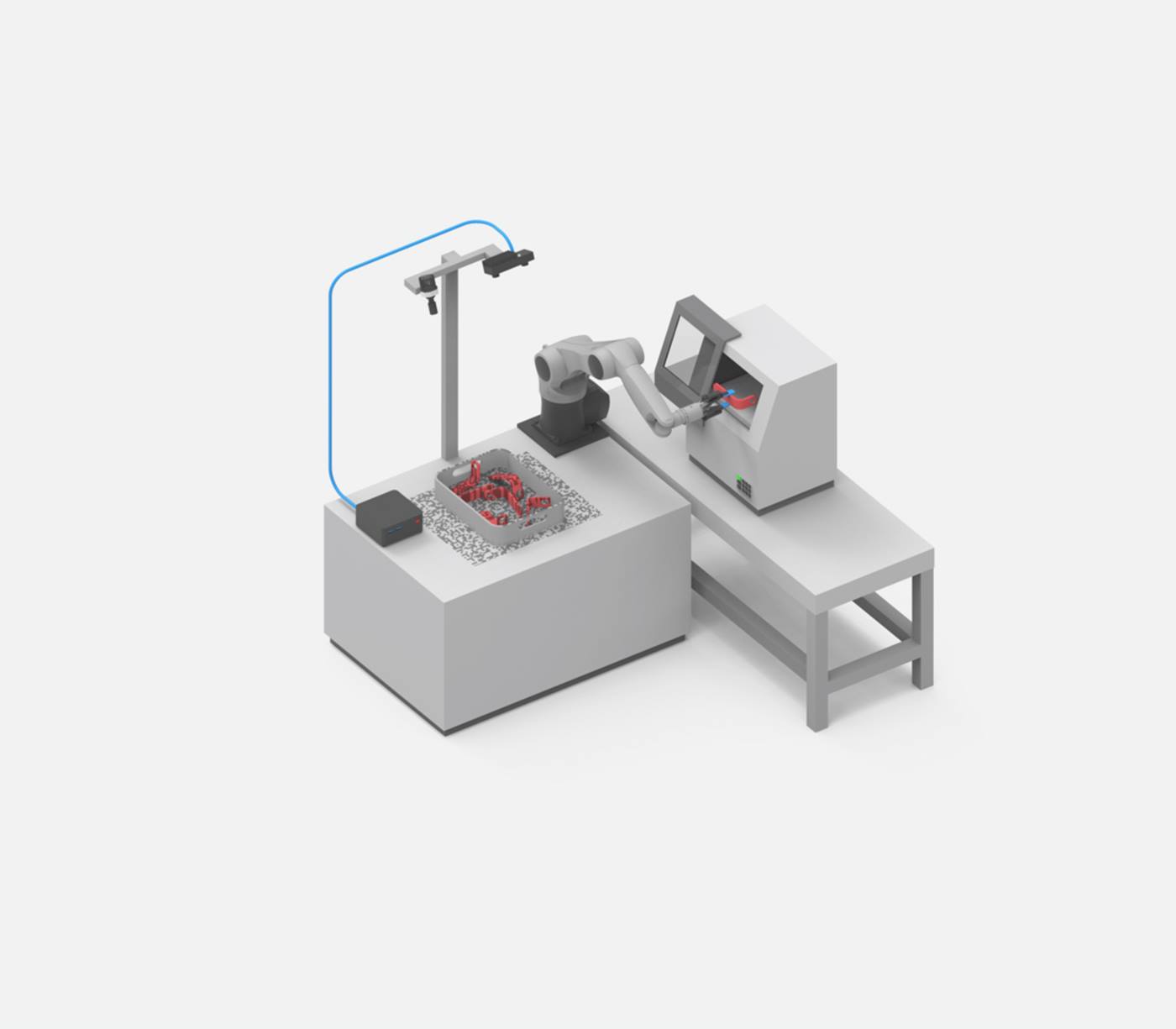
Os objetos dispostos aleatoriamente são detectados e priorizados através da câmera 3D. Ou seja: O software estrutura qual componente oferece a melhor maneira de ser apanhado e, através disso, determina uma sequência ideal. O planejamento de trajetória integrado calcula o caminho livre de colisão para o Bin Picking, inclusive todos os ângulos, para apanhar peça por peça da caixa. Através do agarramento com o quinto eixo, ou seja, a mão do robô, são possíveis ângulos consideravelmente mais precisos.
Caminho livre para a automação e Industrie 4.0
Enquanto o robô retira uma peça da caixa com uma pegada altamente precisa, já é planejada em paralelo a próxima trajetória. Isso reduz os tempos de ciclo. O processamento de imagens da câmera 3D e o planejamento da trajetória são realizados em um PC industrial externo, no qual está instalado um KUKA Plug-in. Por isso, o cliente não precisa se preocupar, pois ele recebe um pacote de software pronto. Em outras palavras: Caminho livre para por a mão na caixa e um Bin Picking inteligente.
Qual é o papel da inteligência artificial na detecção de objetos?
Para preparar da melhor forma possível a mão na caixa e o picking inteligente, um modelo CAD é carregado em um ambiente de simulação foto-realístico. Lá o sistema é treinado e a imagem é otimizada por meio de uma ampla biblioteca, por exemplo, no que diz respeito a reações de cor e condições de iluminação, para atender todas as exigências. Este processo automatizado pode ser executado durante a noite, de forma que a aplicação robótica possa ser usada no dia seguinte.