Nhận dạng, cấu trúc, gắp: Đây là cách thức hoạt động của ứng dụng chọn thùng
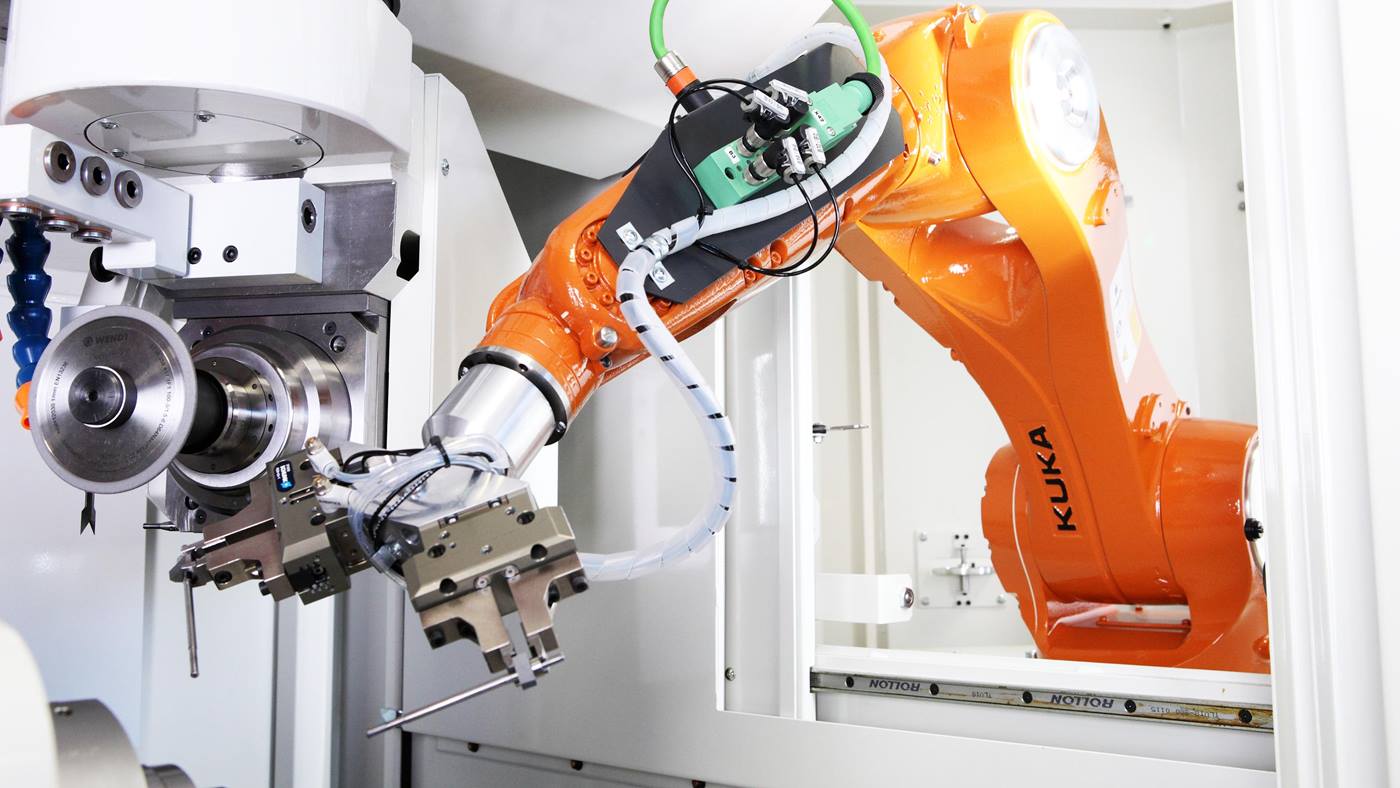
Gắp các bộ phận từ thùng một cách đáng tin cậy mà không va vào thùng chứa: Với gói công nghệ KUKA.SmartBinPicking hiện tại việc này có thể được tự động hóa. Phần mềm này, kết hợp với khả năng nhận dạng tầm nhìn của Roboception, cho phép gắp không có va chạm và dị thường các bộ phận từ một hộp, chẳng hạn bởi rô-bốt sáu trục KR AGILUS, KR CYBERTECH hay KR IONTEC.
Các thành phần lộn xộn không còn là thách thức
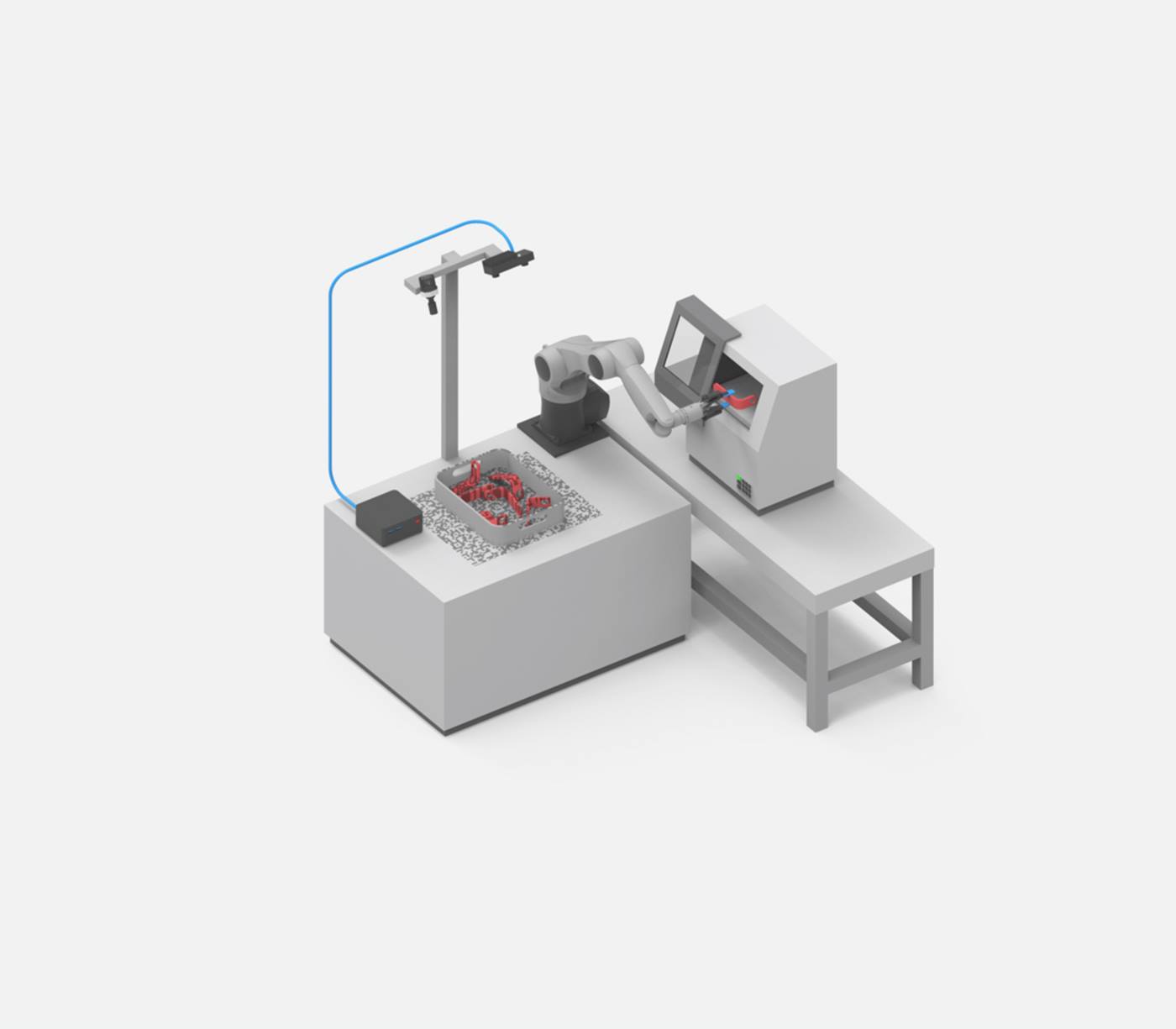
Các đối tượng được sắp xếp ngẫu nhiên được camera 3D nhận dạng và ưu tiên. Điều đó có nghĩa là: Phần mềm cấu trúc thành phần nào có thể gắp tốt nhất và theo đó xác định một trình tự tối ưu. Lập kế hoạch đường đi tích hợp tính toán đường đi không va chạm cho việc chọn thùng, bao gồm tất cả các góc độ, để gắp từng bộ phận từ thùng. Bằng cách gắp với trục thứ năm, hay còn gọi là bàn tay rô-bốt, các góc có thể chính xác hơn đáng kể.
Mở đường cho tự động hóa và Công nghiệp 4.0
Trong khi rô-bốt đang lấy một bộ phận ra khỏi hộp với một lần gắp có độ chính xác cao, đồng thời tuyến đường tiếp theo cũng được lên kế hoạch. Điều này rút ngắn thời gian chu kỳ. Quá trình xử lý hình ảnh của camera 3D và lập kế hoạch đường đi được thực hiện trên một PC công nghiệp bên ngoài có cài đặt plug-in KUKA. Khách hàng không phải lo lắng về điều đó, vì họ nhận được một gói phần mềm hoàn chỉnh. Theo đó nó có nghĩa: Mở đường cho việc chọn thùng và chọn thùng thông minh.
Trí tuệ nhân tạo đóng vai trò gì trong nhận dạng đối tượng?
Để chuẩn bị cho việc gắp vào thùng và chọn thông minh tốt nhất có thể, một mô hình CAD được tải vào một môi trường mô phỏng ảnh thực tế. Tại đó, hệ thống được đào tạo và hình ảnh được tối ưu hóa để đáp ứng tất cả các yêu cầu bằng cách sử dụng một thư viện lớn, ví dụ về phản ứng màu sắc và điều kiện ánh sáng. Quá trình tự động này có thể chạy qua đêm để ứng dụng rô-bốt có thể được sử dụng vào ngày hôm sau.