U gebruikt een oudere browser-versie van Internet Explorer. Actualiseer uw browser voor een optimale weergave
KUKA.RoboTeam
KUKA.RoboTeam maakt het mogelijk dat maximaal vier robots in team samenwerken. Bovendien kunnen de robots zich met externe-as-kinematica zoals werkstukpositioneerders of lineaire assen van robots synchroniseren om tijds- en geometriegebonden afgestemde bewegingen te kunnen uitvoeren.
Tijds- en geometriegebonden koppeling met software KUKA.RoboTeam
Tijdsgebonden koppeling van robots
Met de software KUKA.RoboTeam worden klassieke, centrale PLC-functionaliteiten zoals werkbereik-vergrendelingen of programma-synchronisatie direct naar de robotgroep verplaatst. Zo worden alle taken die direct op de robotgroep van toepassing zijn, onafhankelijk door deze overgenomen.
Geometrische koppeling van robots
De geometrische baan- en transportkoppeling van meerdere robots wordt met diverse processen verbonden. Hierdoor is moderne bandproductie mogelijk en worden duidelijke verkortingen van de cyclustijd gegarandeerd. Zo lossen geometrisch gekoppelde robots met maximale flexibiliteit alle handlingstaken op vlak van transport van zware lasten op en bereiken ze een procesgeoptimaliseerde positionering van speciaal niet-vormstabiele werkstukken. Met deze functie kunnen ook processen parallel met het materiaaltransport worden toegepast.
Twee KUKA robots bij de handling van extreem zware vlakglasbouwdelen.
KUKA.RoboTeam: functies voor de tijds- en geometriegebonden koppeling van robots
Tijdsgebonden koppeling van robots
Programmasynchronisatie: Gesynchroniseerde bewegingsstart van twee of meer robots
Bewegingssynchronisatie: Gesynchroniseerde bewegingstijd van twee of meer robots
Geometrische koppeling van robots of robots en een externe-as-kinematica
Lastdelingsproces: Synchroon werken van twee of meer robots
Procesafhankelijk proces: Samenwerken van twee of meer robots in een proces
Gecombineerd proces: Combinatie van lastdelingsproces en procesafhankelijk proces
Geavanceerd master-slaveprincipe: Synchroon werken van twee of meer robots met een externe-as-kinematica
Het instellen van de synchronisatiecommando's vindt bij KUKA.RoboTeam plaats via de programmeerinterface van de robot.
Wijzigingen in het baan- of snelheidsgedrag van elke robot binnen de groep, hebben een invloed op alle betroffen robots.
Alle veiligheidsrelevante signalen worden via het interne veiligheids-bussysteem binnen de robotgroep onmiddellijk gecommuniceerd.
Een noodstop (stop categorie 1) van een betroffen robot veroorzaakt een gesynchroniseerd en baantrouw remmen van de gehele groep.
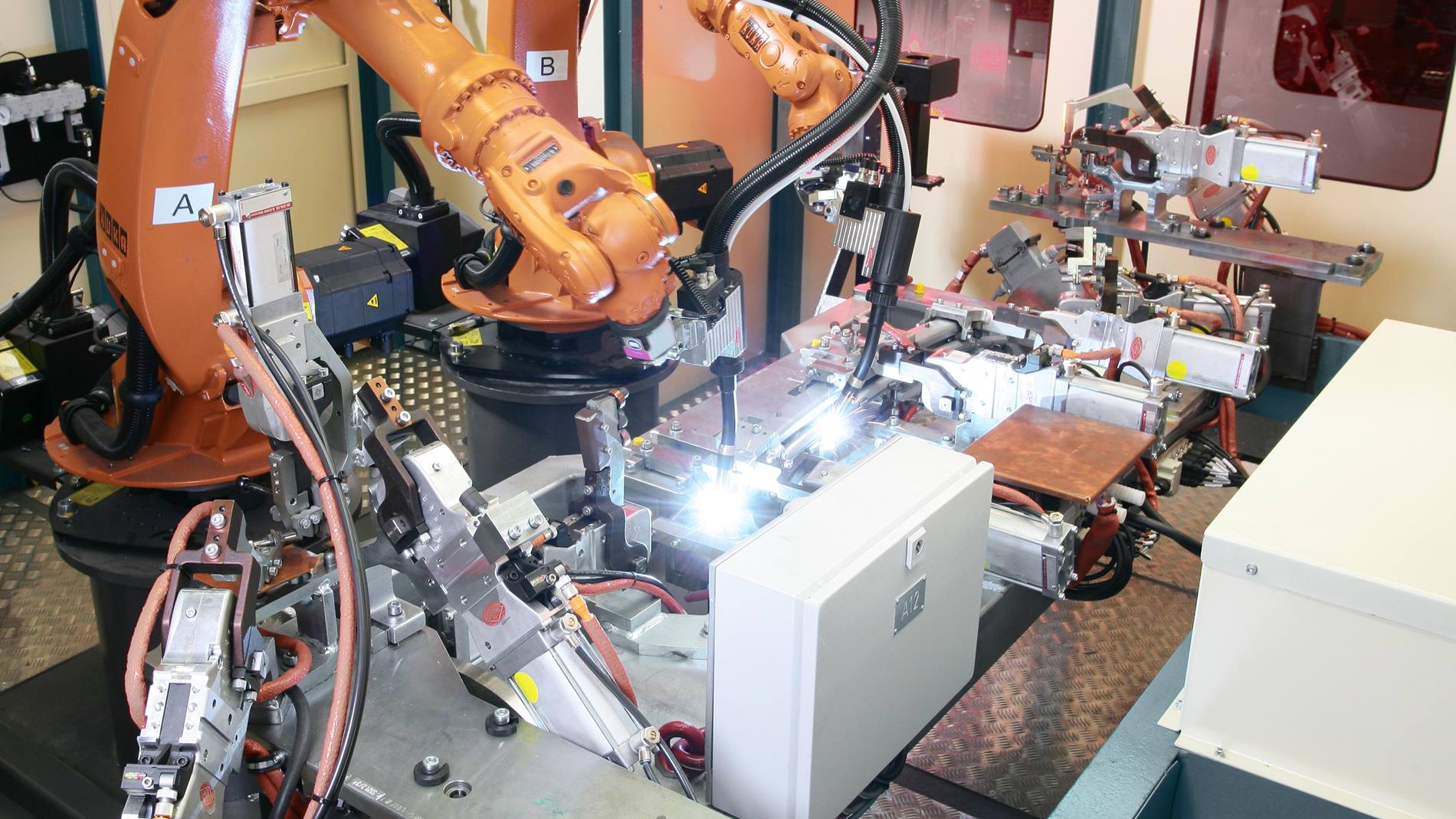
Met de software KUKA.RoboTeam lassen KUKA robots tegelijkertijd aan onderdelen.