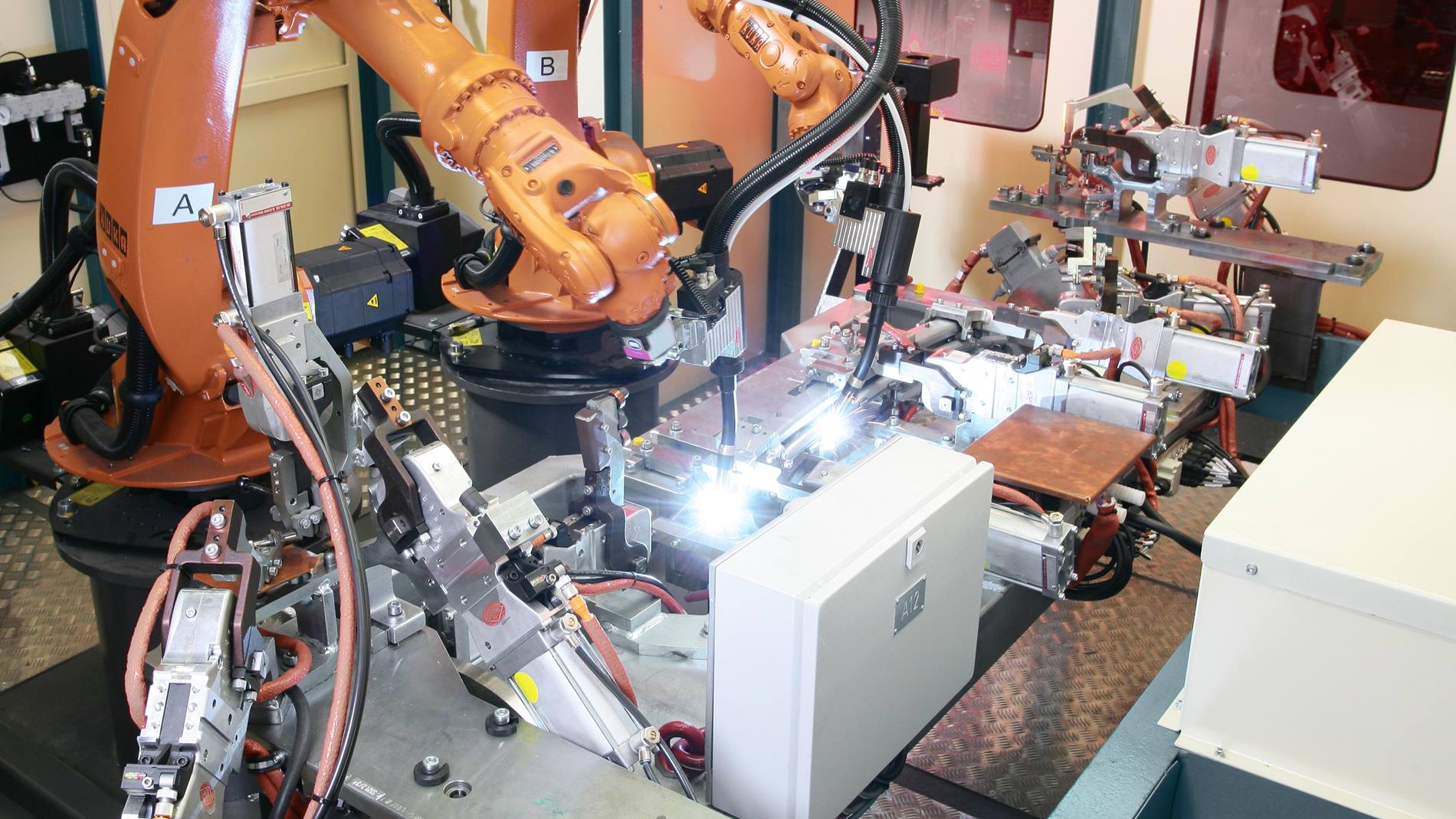
การเชื่อมต่อกันทางเวลาและทางเรขาคณิตด้วยซอฟต์แวร์ KUKA.RoboTeam
การเชื่อมต่อกันทางเวลาของหุ่นยนต์
ด้วยซอฟต์แวร์ KUKA.RoboTeam ฟังก์ชั่น PLC ส่วนกลางแบบคลาสิค อย่างเช่น การเชื่อมต่อขอบเขตการทำงานหรือ การประสานลำดับการทำงานของโปรแกรม จะถูกเคลื่อนย้ายไปยังกลุ่มหุ่นยนต์ ดังนั้น ฟังก์ชั่นนี้จะรับงานทั้งหมดที่เกี่ยวข้องกับกลุ่มหุ่นยนต์โดยตรงอย่างอิสระ