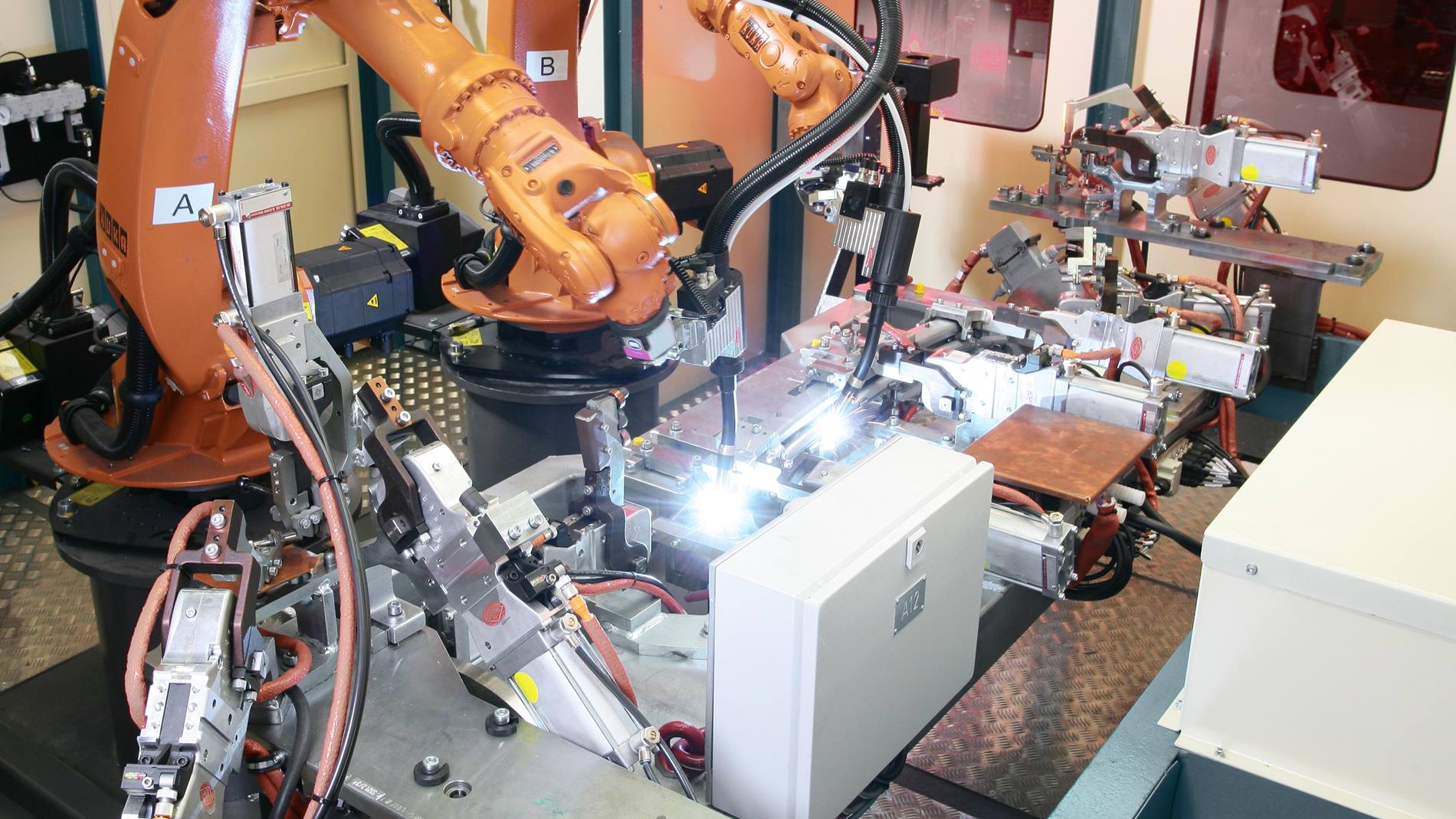
Acoplamento temporal e geométrico com o software KUKA.RoboTeam
Acoplamento temporal de robôs
Através do software KUKA.RoboTeam as funcionalidades PLC centrais clássicas como bloqueios de áreas de trabalho ou sincronização de programas são alocadas diretamente no grupo de robôs. Assim, todas as tarefas, que atingem diretamente o grupo de robôs, são assumidas autarquicamente por eles.