You are using Internet Explorer and will not be able to use our website properly. Please change to an up-to-date browser for ideal presentation of the website.
KUKA.RoboTeam
KUKA.RoboTeam enables up to four robots to cooperate in a team. Beyond this, the robots can be synchronized with external axis kinematic systems, such as workpiece positioners or robot linear axes, in order to execute synchronized and geometrically coupled motions.
Synchronization and geometric coupling using KUKA.RoboTeam software
Synchronization of robots
KUKA.RoboTeam software transfers responsibility for conventional, centralized PLC functions, such as the interlocking of workspaces or program synchronization, directly to the robot group. In this way, all tasks that directly affect the robot group are carried out autonomously by the group.
Geometric coupling of robots
The geometric path and transfer coupling of multiple robots is linked to various different processes. This enables state-of-the-art assembly line production and ensures significantly shorter cycle times. Geometrically coupled robots provide an extremely flexible solution for all handling tasks in which heavy loads need to be transferred and ensure process-optimized positioning even of pliant workpieces. This function can also be used for the application of parallel processes alongside the transfer of materials.
Two KUKA robots handling extremely heavy flat glass.
KUKA.RoboTeam: functions for the synchronization and geometric coupling of robots
Synchronization of robots
Program synchronization: synchronized motion start of two or more robots
Motion synchronization: synchronized motion time of two or more robots
Geometric coupling of robots, or of robots and an external axis kinematic system
Load sharing: synchronous operation of two or more robots
Process-dependent mode: cooperation of two or more robots in a process
Combined mode: combination of the load sharing and process-dependent modes
Extended master/slave principle: synchronous operation of two or more robots with an external axis kinematic system
With KUKA.RoboTeam, the setting of the synchronization commands is carried out in the programming interface of the robot.
Modifications to the path or velocity of each robot in the group have an immediate effect on all other robots in the group.
All safety-relevant signals are immediately communicated within the group via the internal safety bus system.
An Emergency Stop (Stop category 1) of any of the robots in the group triggers synchronized, path-maintaining braking of the entire robot group.
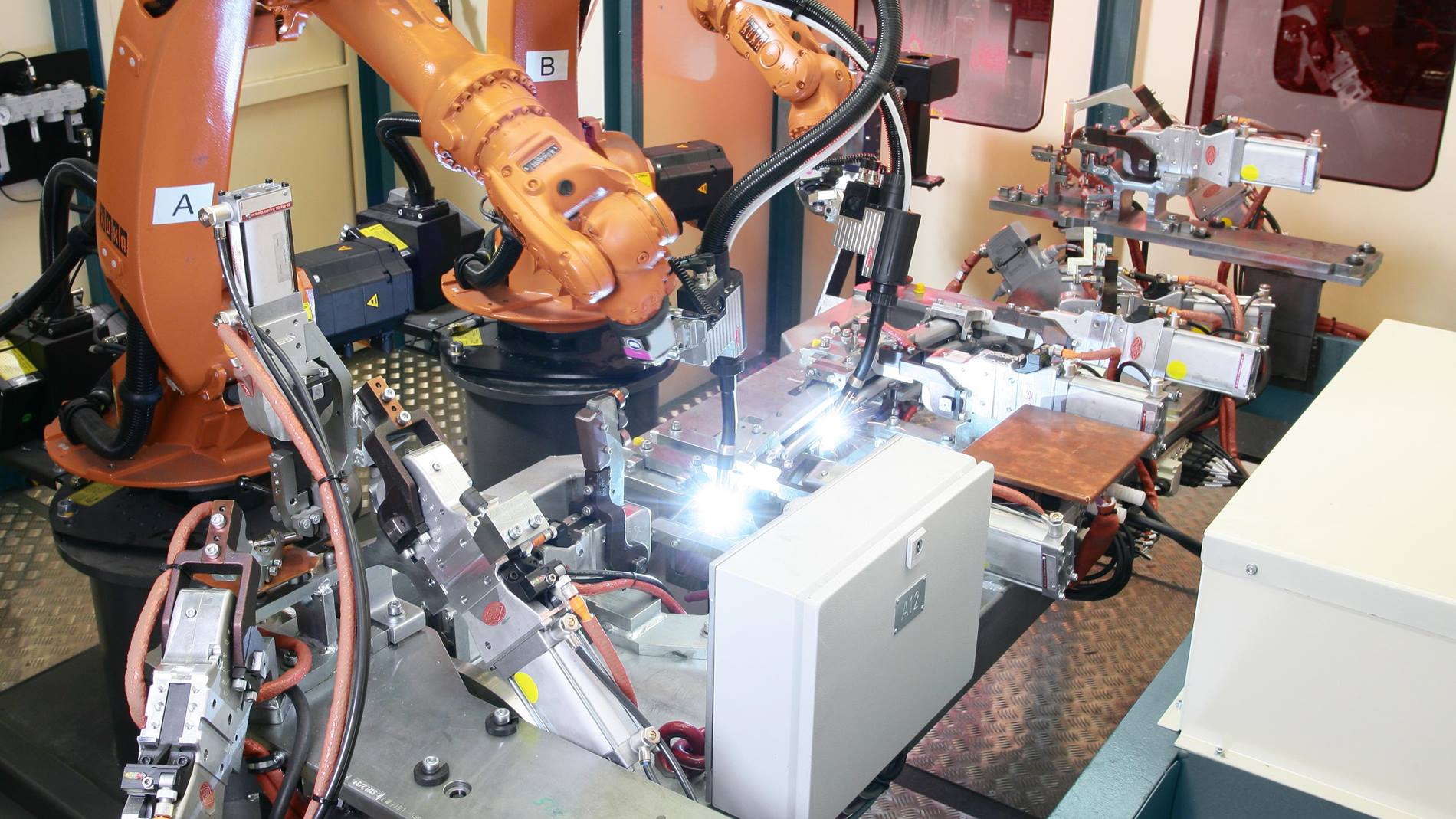
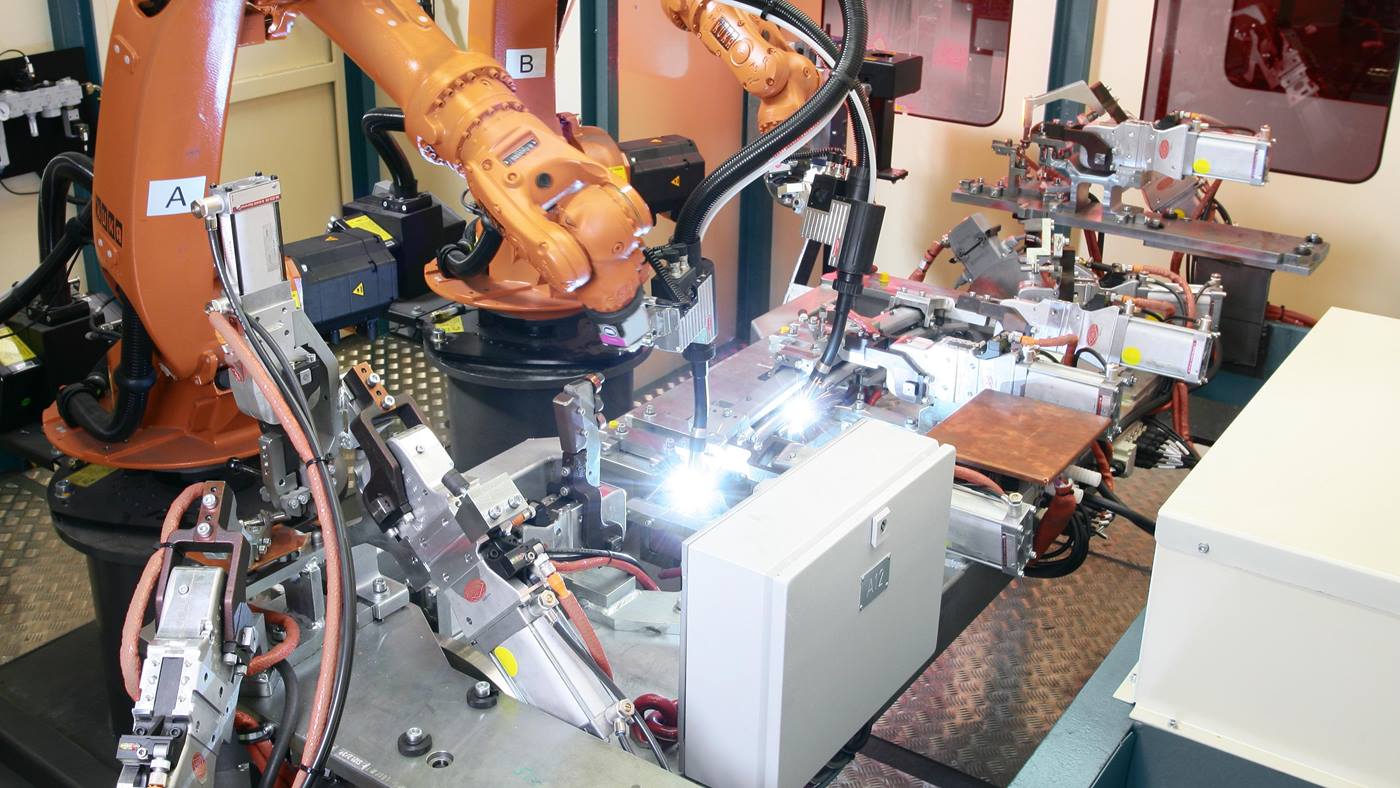
With KUKA.RoboTeam software, two KUKA robots weld workpieces simultaneously.