通过 KUKA.RoboTeam 软件实现的时间和几何耦合
机器人的时间耦合
借助于 KUKA.RoboTeam 软件,传统的中央 PLC 功能,例如工作区锁闭或程序同步等,被直接置入机器人团队中。这样,机器人团队直接涉及的所有任务单独由此软件承担。
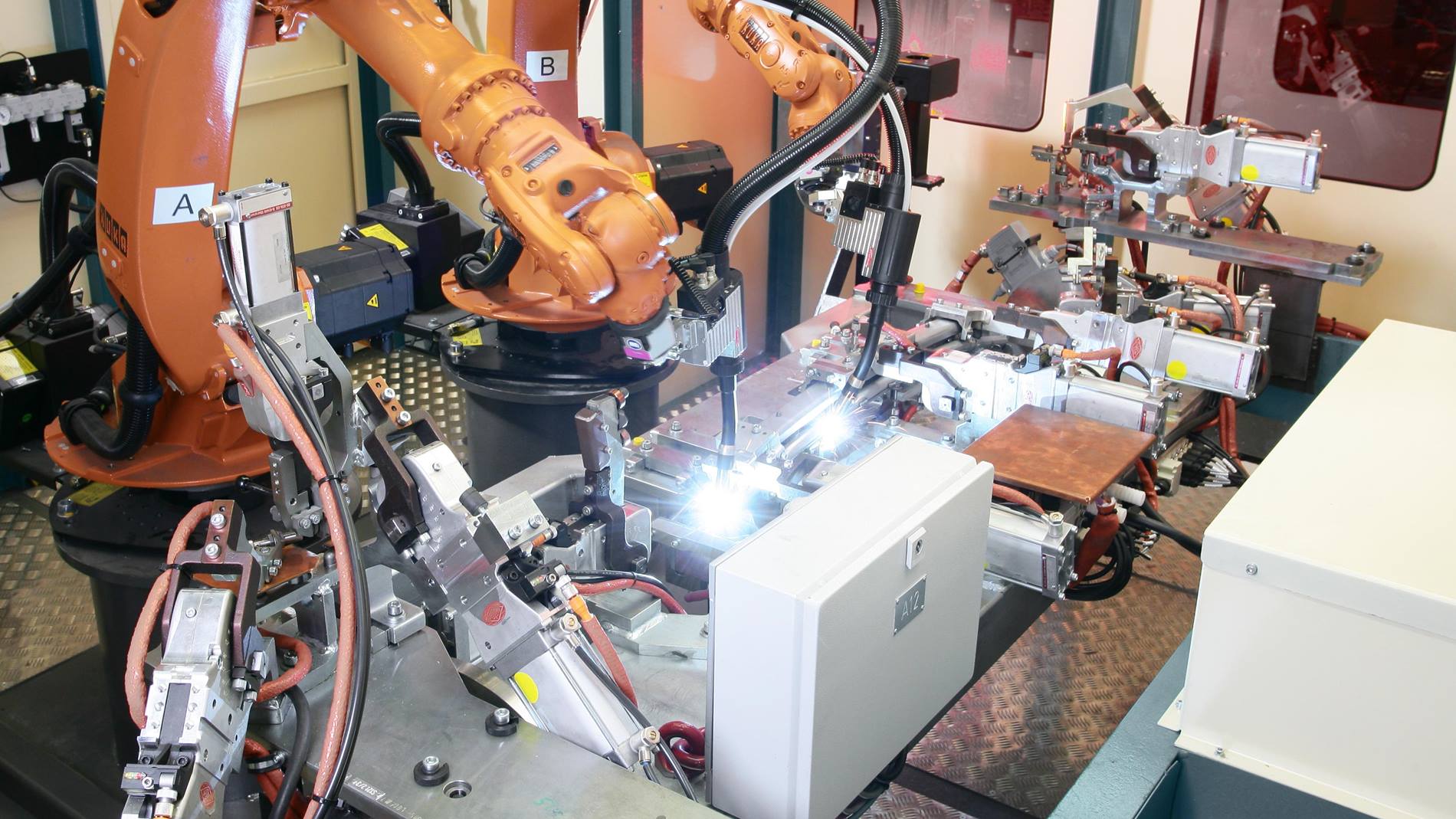
通过 KUKA.RoboTeam 可实现最多四台机器人以团队形式进行协同作业。此外,机器人还可以与附加轴运动系统(例如工件定位器或机器人线性轴)进行同步,以便执行在时间和几何上协调的运动。
借助于 KUKA.RoboTeam 软件,传统的中央 PLC 功能,例如工作区锁闭或程序同步等,被直接置入机器人团队中。这样,机器人团队直接涉及的所有任务单独由此软件承担。
多台机器人的轨道和运输的几何耦合可与不同的加工过程相连。这使实现现代化的流水线生产成为可能,并能确保显著地缩短节拍时间。几何耦合的机器人具有高度的灵活性,可以解决重载搬运范畴内的所有搬运作业,并能保证以优化流程的方式将形状不稳定的工件定位。借助于此功能还可以让加工过程和材料运送平行作业。

程序同步:两个或多个机器人的同步运动开始
运动同步:两个或多个机器人的同步运动时间
负载分配的作业方式:两个或多个机器人的同步作业
依赖于加工过程的作业方式:两个或多个机器人在一个加工过程中的协作
组合式作业方式:负载分配的作业方式和依赖于加工过程的作业方式的组合
扩展的主、辅机器人原理:两个或多个机器人与附加轴运动系统的同步作业



