Vous utilisez le navigateur Internet Explorer. Pour bénéficier d’une représentation optimale, veuillez changer votre navigateur.
KUKA.RoboTeam
KUKA.RoboTeam permet le travail en coopération de jusqu’à quatre robots en équipe. De plus, les robots peuvent se synchroniser avec des cinématiques d’axes supplémentaires telles que des positionneurs de pièces ou des axes linéaires de robot afin de pouvoir effectuer des mouvements en coordination temporelle et géométrique.
Couplage temporel et géométrique avec le logiciel KUKA.RoboTeam
Couplage temporel de robots
A l'aide du logiciel KUKA.RoboTeam, des fonctions API classiques et centrales telles que les verrouillages d'enveloppes d'évolution ou la synchronisation de programmes peuvent être transmises directement au groupe de robots. De cette façon, toutes les tâches concernant directement le groupe de robot sont reprises par celui-ci de façon autarcique.
Couplage géométrique de robots
Le couplage géométrique de la trajectoire et du transport de plusieurs robots est relié avec différents projets. Ceci rend possible une production à la chaîne moderne et garantit une réduction considérable des durées de cycle. Les robots couplés géométriquement se chargent par exemple de toutes les opérations de manutention avec une extrême flexibilité dans le domaine du transport de charges lourdes. Ils garantissent ainsi le positionnement optimisé par rapport au processus de pièces déformables. Cette fonction permet également d'exécuter des processus parallèlement au transport de matériel.
Deux robots KUKA lors de la manutention de pièces en verre plat extrêmement lourdes.
KUKA.RoboTeam : fonctions pour le couplage temporel et géométrique de robots
Couplage temporel de robots
Synchronisation de programmes Démarrage de déplacement synchronisé de deux ou de plusieurs robots
Synchronisation de déplacements : Temps de déplacement synchronisé de deux ou de plusieurs robots
Couplage géométrique de robots ou de robots et d'une cinématique d'axe supplémentaire
Procédé de distribution de la charge : Travail synchrone de deux ou de plusieurs robots
Procédé relatif au processus : Coopération de deux ou de plusieurs robots dans un processus
Procédé combiné : Combinaison de procédé de partage de la charge et de procédé dépendant du processus
Principe Maître-Esclave élargi : Travail synchrone de deux ou de plusieurs robots avec une cinématique d'axe supplémentaire
Avec KUKA.RoboTeam, l’activation des instructions de synchronisation est effectuée avec l’interface de programmation du robot.
Les modifications de la trajectoire ou de la vitesse de chaque robot du groupe se répercutent sans temporisation sur tous les robots concernés.
Tous les signaux importants pour la sécurité sont transmis au sein du groupe de robots par le système de bus de sécurité interne.
L’arrêt d’urgence (catégorie de stop 1) d’un robot participant entraîne un freinage synchronisé et conforme à la trajectoire de l’ensemble du groupe.
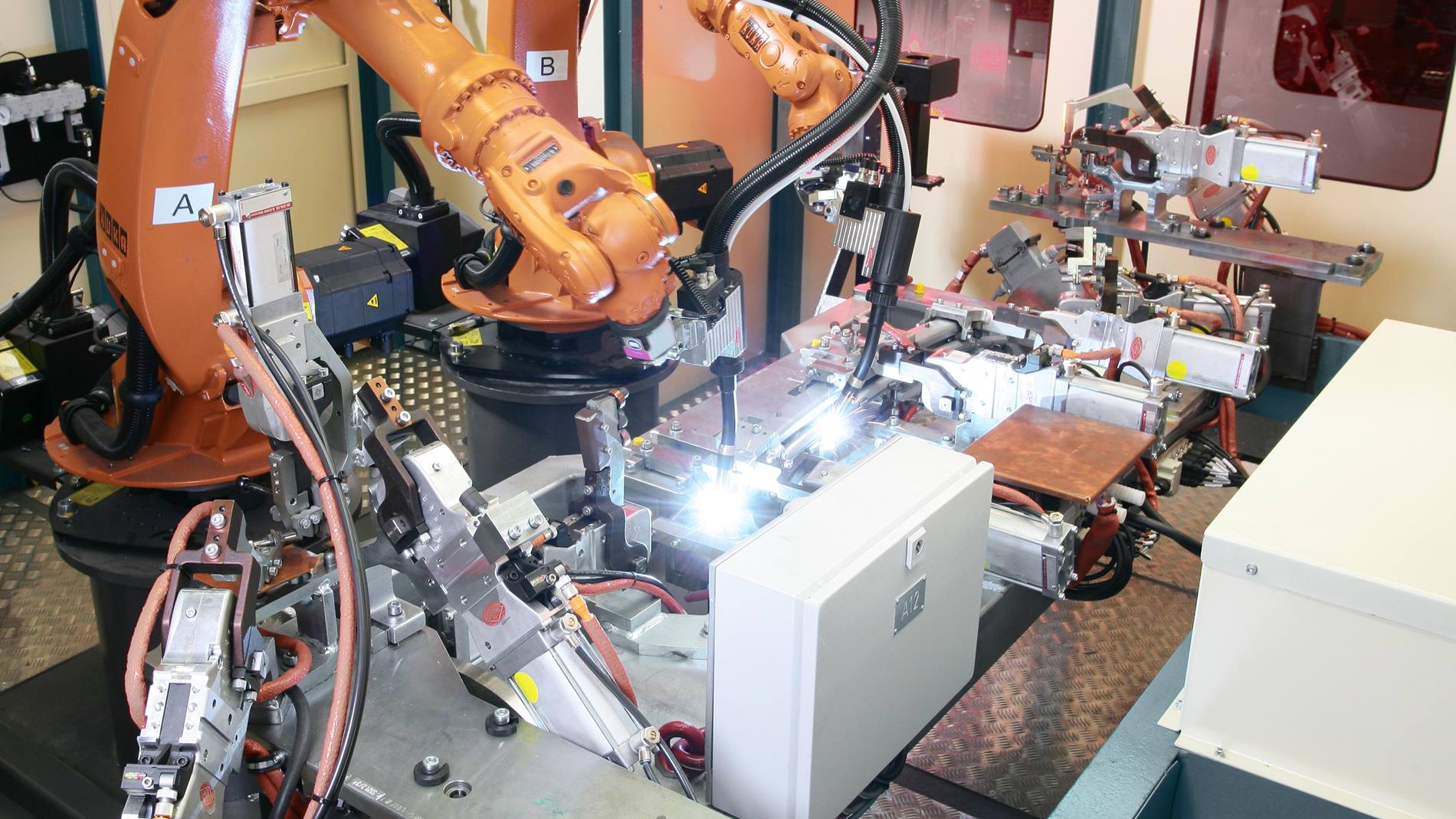
Avec le logiciel KUKA.RoboTeam, deux robots KUKA effectuent simultanément des soudages sur des pièces.