používate yastaralú verziu prehliadačaInternet Explorer. prosím zaktualizujte prehliadač na novšiu verziu
KUKA.RoboTeam
KUKA.RoboTeam umožňuje kooperujúcu prácu až štyroch robotov v tíme. Roboty sa dajú doplnkovo synchronizovať pomocou kinematík doplnkových osí ako polohovač obrobku alebo lineárne osi robotov, aby sa mohli vykonávať časovo a geometricky zladené pohyby.
Časové a geometrické prepojenie so softvérom KUKA.RoboTeam
Časové spojenie robotov
Pomocou softvéru KUKA.RoboTeam sa klasické, centrálne funkcie SPS ako blokovania pracovnej oblasti alebo synchronizácia programu prenesú priamo do skupiny robotov. Tým sa všetky úlohy, ktoré sa priamo týkajú skupiny robotov, autarkne prevezmú nimi.
Geometrické prepojenie robotov
Geometrické prepojenie dráhy a prepravy viacerých robotov sa spája s rôznymi procesmi. To umožňuje modernú plynulú výrobu a zaručuje výrazné skrátenie dôb taktov. Geometricky prepojené roboty týmto spôsobom s maximálnou flexibilitou odstraňujú všetky manipulačné úlohy v oblasti prepravy ťažkých nákladov a dosahujú procesne orientované polohovanie špeciálne pri tvárovo nestálych obrobkoch. Pomocou tejto funkcie sa môžu paralelne k preprave materiálu aplikovať aj procesy.
Dva roboty KUKA pri manipulácii s extrémne ťažkými konštrukčnými dielmi z plochého skla.
KUKA.RoboTeam: Funkcie na časové a geometrické prepojenie robotov
Časové spojenie robotov
Synchronizácia programu: Synchronizovaný štart pohybu dvoch alebo viacerých robotov
Synchronizácia pohybu: Synchronizovaný čas pohybu dvoch alebo viacerých robotov
Geometrické prepojenie robotov alebo robotov a doplnkovej kinematiky osí
Metóda rozdelenia bremena: Synchronizovaná práca dvoch alebo viacerých robotov
Postup závislý od procesu: Spolupráca dvoch alebo viacerých robotov na jednom procese
Kombinovaný postup: Kombinácia postupu rozdelenia bremena a postupu závislého od procesu
Rozšírený princíp Master-Slave: Synchronizovaná práca dvoch alebo viacerých robotov s doplnkovou kinematikou osí
Aktivovanie synchronizačných povelov sa vykonáva pri KUKA.RoboTeam prostredníctvom programového rozhrania robota.
Zmeny v správaní na dráhe alebo rýchlosti každého robota v rámci skupiny sa bez oneskorenia prenášajú na všetky zúčastnené roboty.
Všetky signály relevantné z hľadiska bezpečnosti sa komunikujú cez interný bezpečnostný systém prevádzkovej zbernice v rámci skupiny robotov.
Núdzové zastavenie (Stop kategória 1) zúčastneného robota vyvolá synchronizované a dráhovo presné brzdenie celej skupiny.
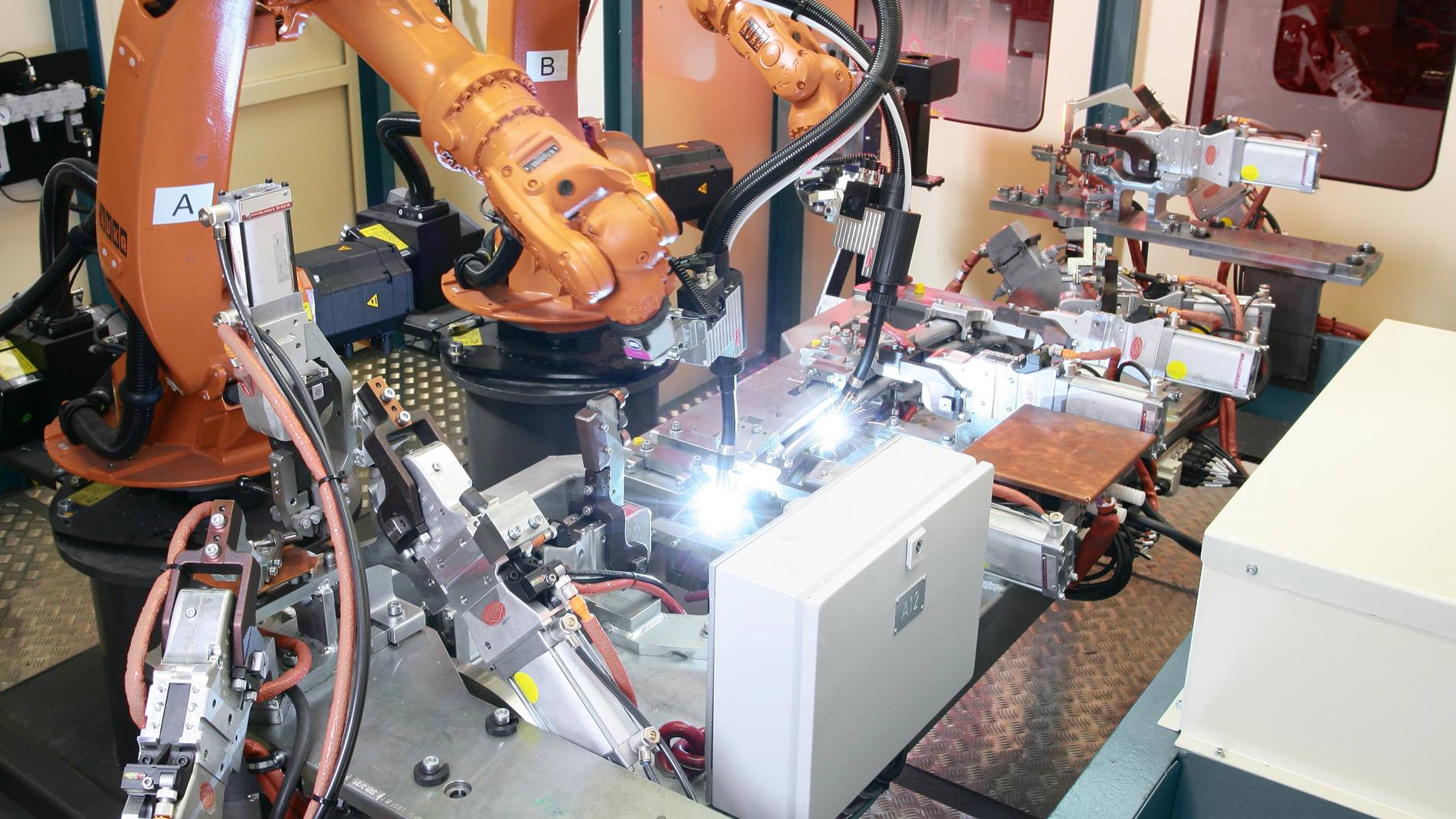
So softvérom KUKA.RoboTeam zvárajú na konštrukčných dieloch súčasne dva roboty KUKA.