KUKA.RoboTeam 소프트웨어를 통한 시간적·기하학적 연결
로봇 간 시간적 연결
KUKA.RoboTeam 소프트웨어를 통해 작동범위 잠금 및 프로그램 시퀀스 동기화와 같은 전형적인 핵심 PLC 기능들을 직접 로봇 그룹에서 수행할 수 있게 되었습니다. 이를 통해 로봇 그룹에게 직접 주어지는 모든 과제를 독립적으로 담당합니다.
현재 이전 브라우저 버전의 Internet Explorer를 사용하고 계십니다.
최적화된 보기를 위해 브라우저를 업데이트해 주십시오.
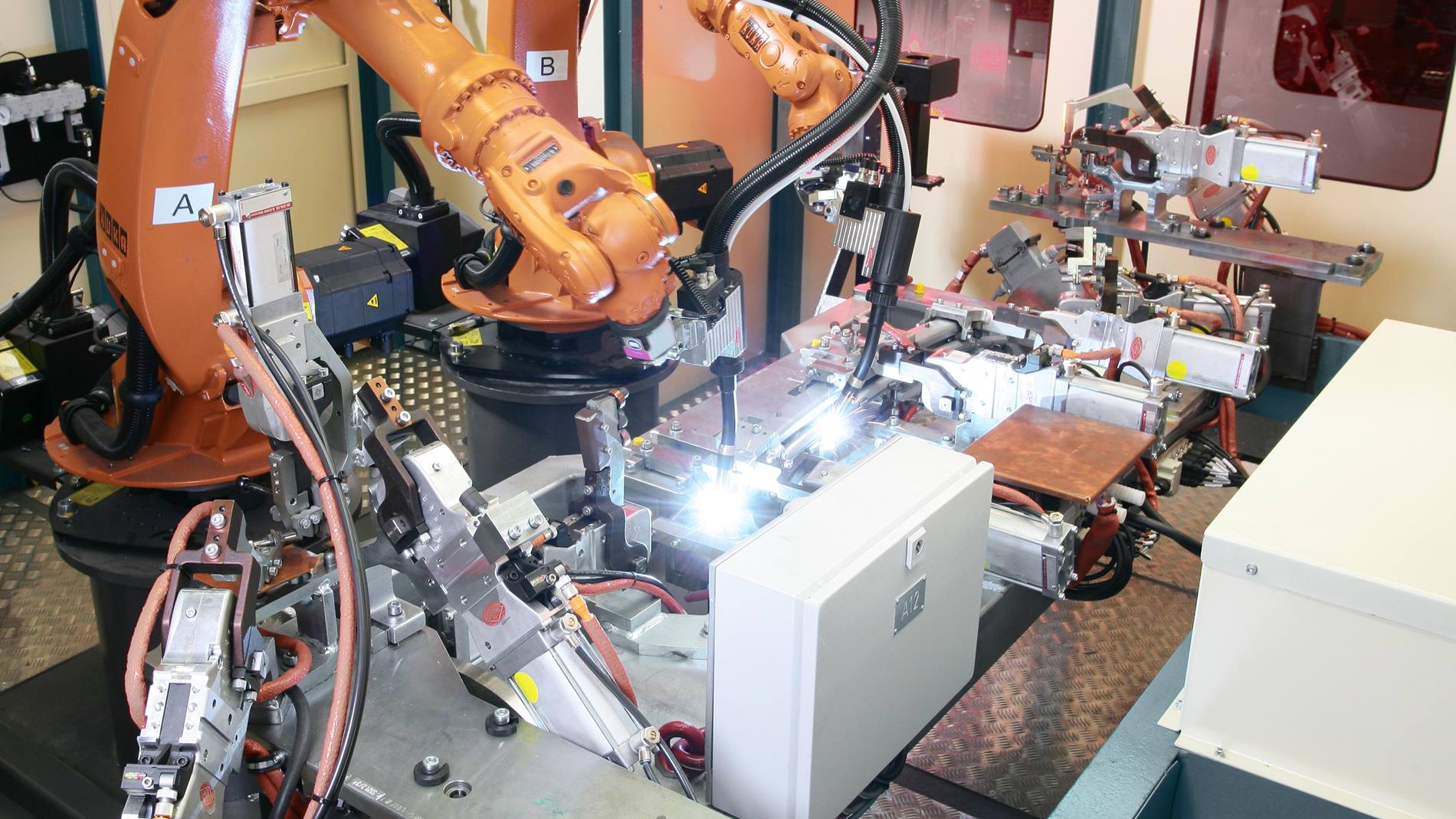
KUKA.RoboTeam은 최대 4대의 로봇이 팀을 구성하는 협력 작업을 구현합니다. 추가적인 축으로 얻은 키네마틱으로 로봇들은 가공재 위치 조절기 또는 로봇 선형 축과 같이 동기화하여, 시간적·기하학적으로 설정된 모션을 수행할 수 있습니다.
KUKA.RoboTeam 소프트웨어를 통해 작동범위 잠금 및 프로그램 시퀀스 동기화와 같은 전형적인 핵심 PLC 기능들을 직접 로봇 그룹에서 수행할 수 있게 되었습니다. 이를 통해 로봇 그룹에게 직접 주어지는 모든 과제를 독립적으로 담당합니다.
다수의 로봇 간 기하학적인 경로 및 운송 연결은 다양한 과정을 통해 결합됩니다. 이는 현대적인 흐름생산(flow production)을 가능하게 하며 현저한 사이클 타임 단축을 보장합니다. 이로써 기하학적으로 연결된 로봇들이 고하중 운반 영역에서 최고의 유연성으로 모든 핸들링 작업을 처리하며 특히 치수가 안정적이지 않은 제품에 대해 최적화된 프로세스로 포지셔닝할 수 있습니다. 또한 이 기능을 이용하여 재료를 운반하는 동시에 프로세스를 진행할 수 있습니다.

프로그램 동기화: 둘 또는 그 이상의 로봇이 모션 시작 동기화
모션 동기화: 둘 또는 그 이상의 로봇이 모션 시간 동기화
로드 유닛 처리: 둘 또는 그 이상의 로봇이 작업 동기화
공정별 처리: 둘 또는 그 이상의 로봇이 한 공정에서 협업
결합 처리: 로드 유닛 처리와 공정별 처리의 결합
확장형 Master-Slave 원칙: 추가 축 키네마틱을 보유한 둘 또는 그 이상의 로봇 간 작업 동기화