KUKA.RoboTeamソフトウェアでの時間的および幾何学的連結
ロボットの時間的連結
KUKA.RoboTeamソフトウェアを使えば、作業範囲ロックやプログラム同期などの典型的な主要PLC機能を直接ロボットグループに移行できます。これにより、ロボットグループは直接このグループに関わるタスクをすべて自律的に引き受けます。
Internet Explorerの旧バージョンのブラウザが使用されています。
最適な表示にするにはブラウザを更新してください
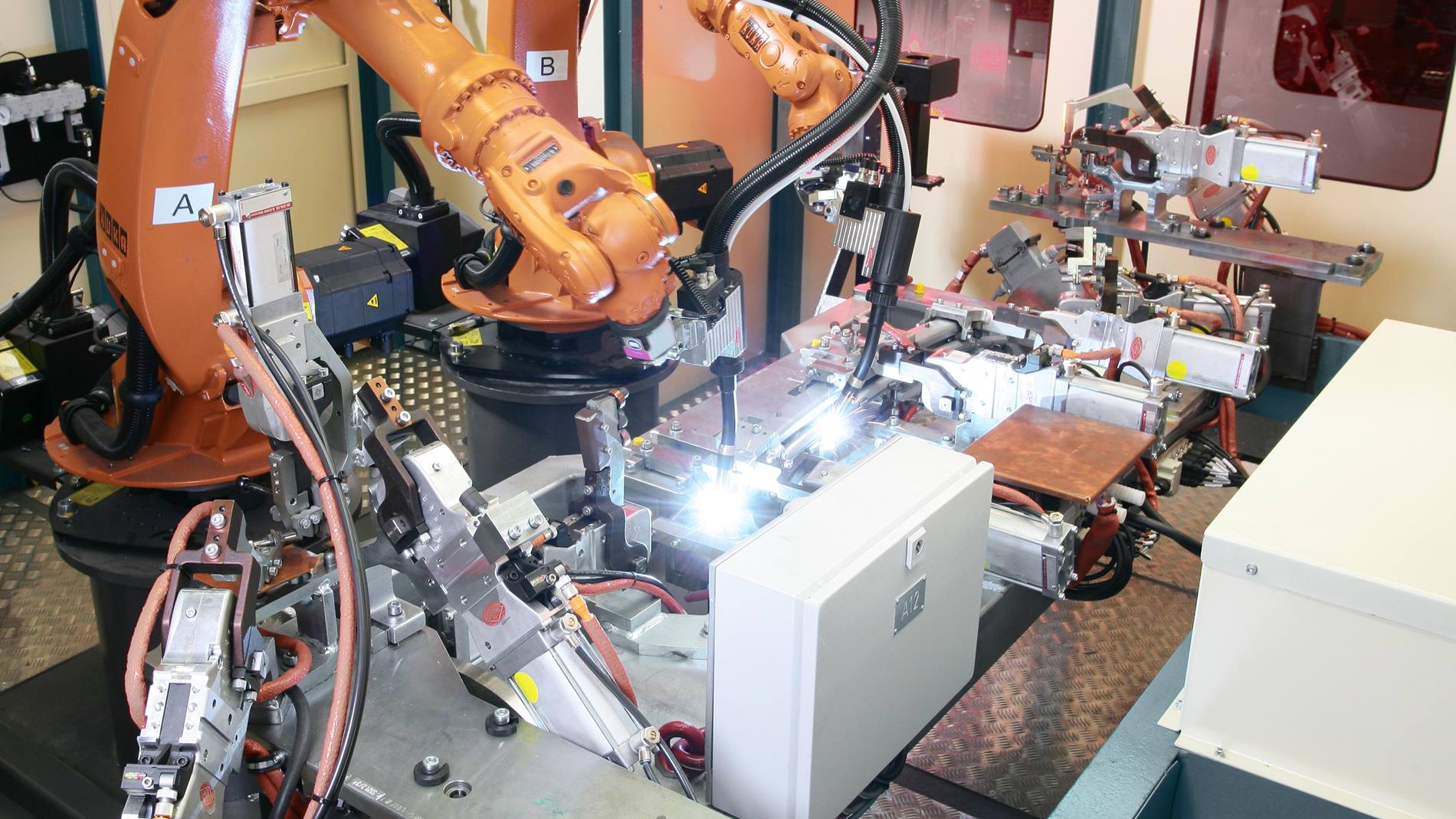
KUKA.RoboTeamは4台までのロボットをチームとして共同作業させることができます。さらにロボットたちは、時間的・幾何学的に調和した動作を行えるように、ワーク位置決め装置やロボットリニア軸などの追加軸キネマティクスと同期することができます。
KUKA.RoboTeamソフトウェアを使えば、作業範囲ロックやプログラム同期などの典型的な主要PLC機能を直接ロボットグループに移行できます。これにより、ロボットグループは直接このグループに関わるタスクをすべて自律的に引き受けます。
複数のロボットの幾何学的な経路および搬送連結は、さまざまなプロセスと結びつけられます。これにより、最先端の流れ作業が可能になり、タクトタイムの大幅な短縮が保証されます。そのため、幾何学的に連結されたロボットが最高のフレキシビリティで、重量物搬送のハンドリングタスクをすべて引き受け、また、特に形状不安定なワークの工程に最適な位置決めを可能にします。この機能で、マテリアル搬送と並行してプロセスを適用することもできます。

プログラム同期:2台以上のロボットの動作開始の同期
動作同期:2台以上のロボットの動作時間の同期
負荷分散方法:2台以上のロボットの同期作業
プロセスに応じた方法:1つのプロセスにおける2台以上のロボットの共同作業
組み合わせた方法:負荷分散方法とプロセスに応じた方法の組み合わせ
拡張したマスター・スレーブ原理:2台以上のロボットと追加軸キネマティクスの同期作業