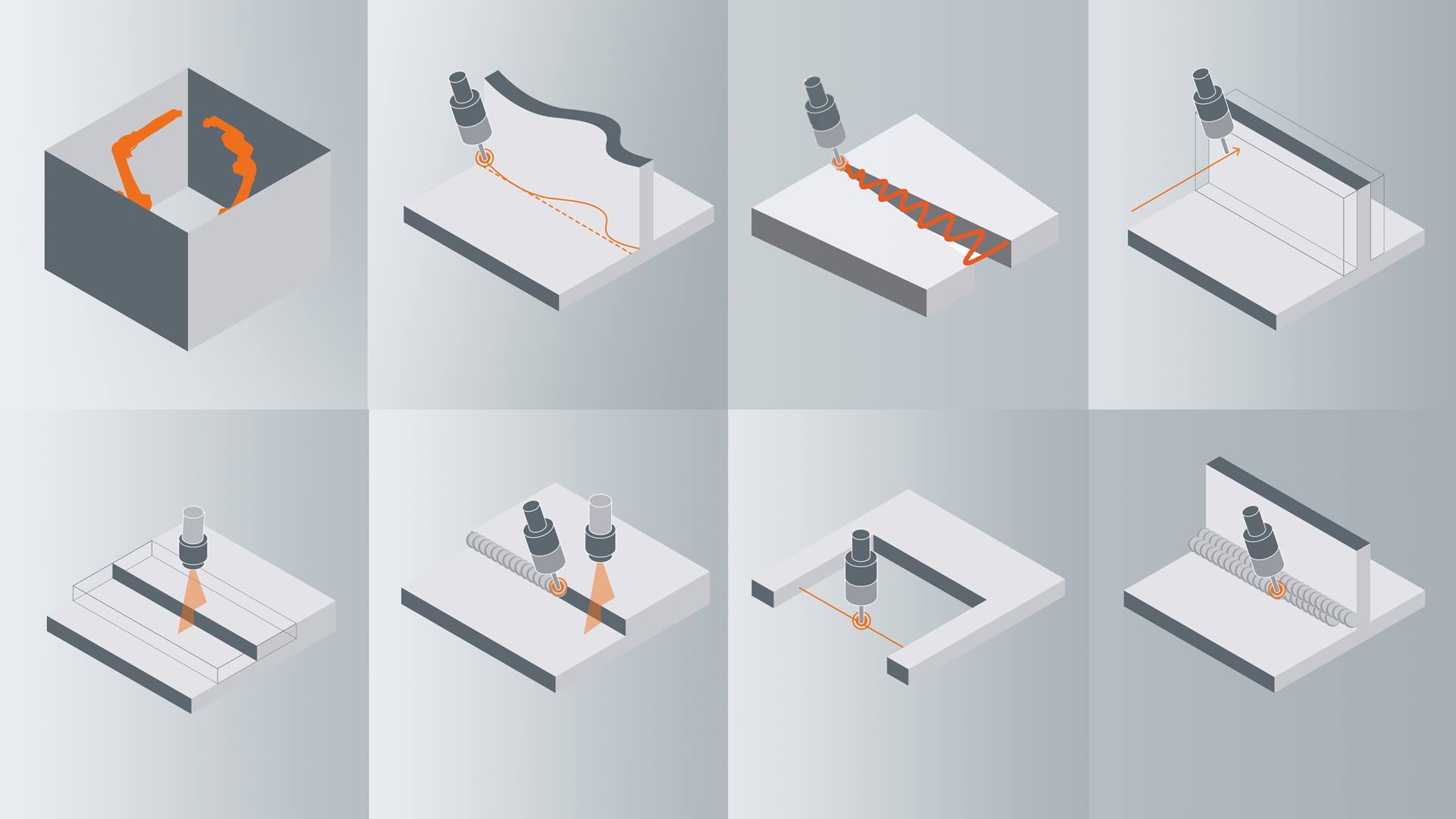
최고의 경제성 및 유연성: 모든 요건을 만족시키는 아크 용접 로봇
6-22kg 가반하중 및 최대 3,100mm의 작업반경을 자랑하며, 인라인 손목 로봇 또는 중공 손목 로봇의 2가지 디자인으로 선택할 수 있는 아크 용접용 특수 로봇으로 이익을 누리십시오. KUKA.ArcTech과 같은 혁신적 용접 소프트웨어, 다양한 포지셔너 및 리니어 유닛은 KUKA의 제품군을 완성해주며, 이로써 귀사 시스템의 최고 퍼포먼스 및 용접 자동화의 이상적 통합 솔루션을 제공합니다.