Automazione completa della verniciatura degli assi posteriori di azionamento
Il robot KUKA garantisce la rotazione corretta
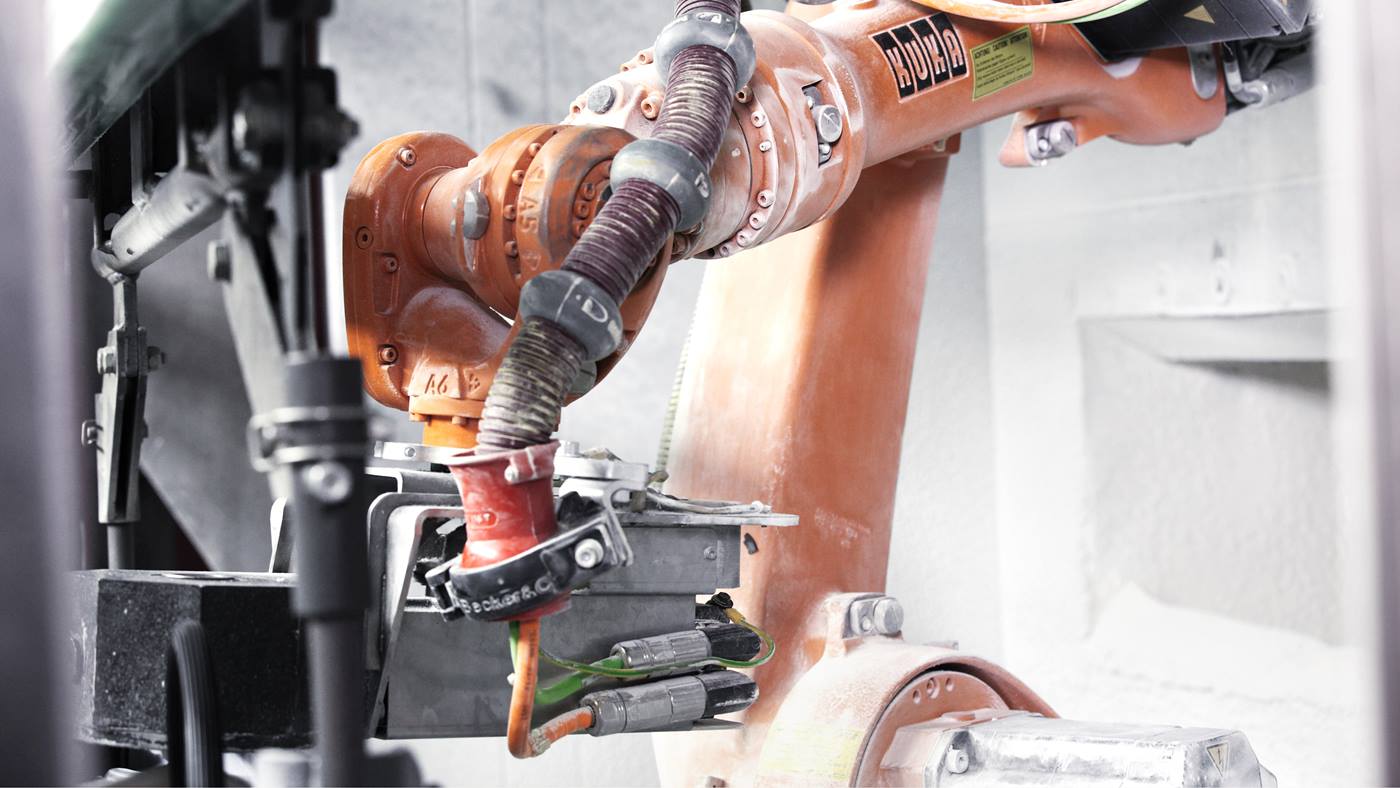
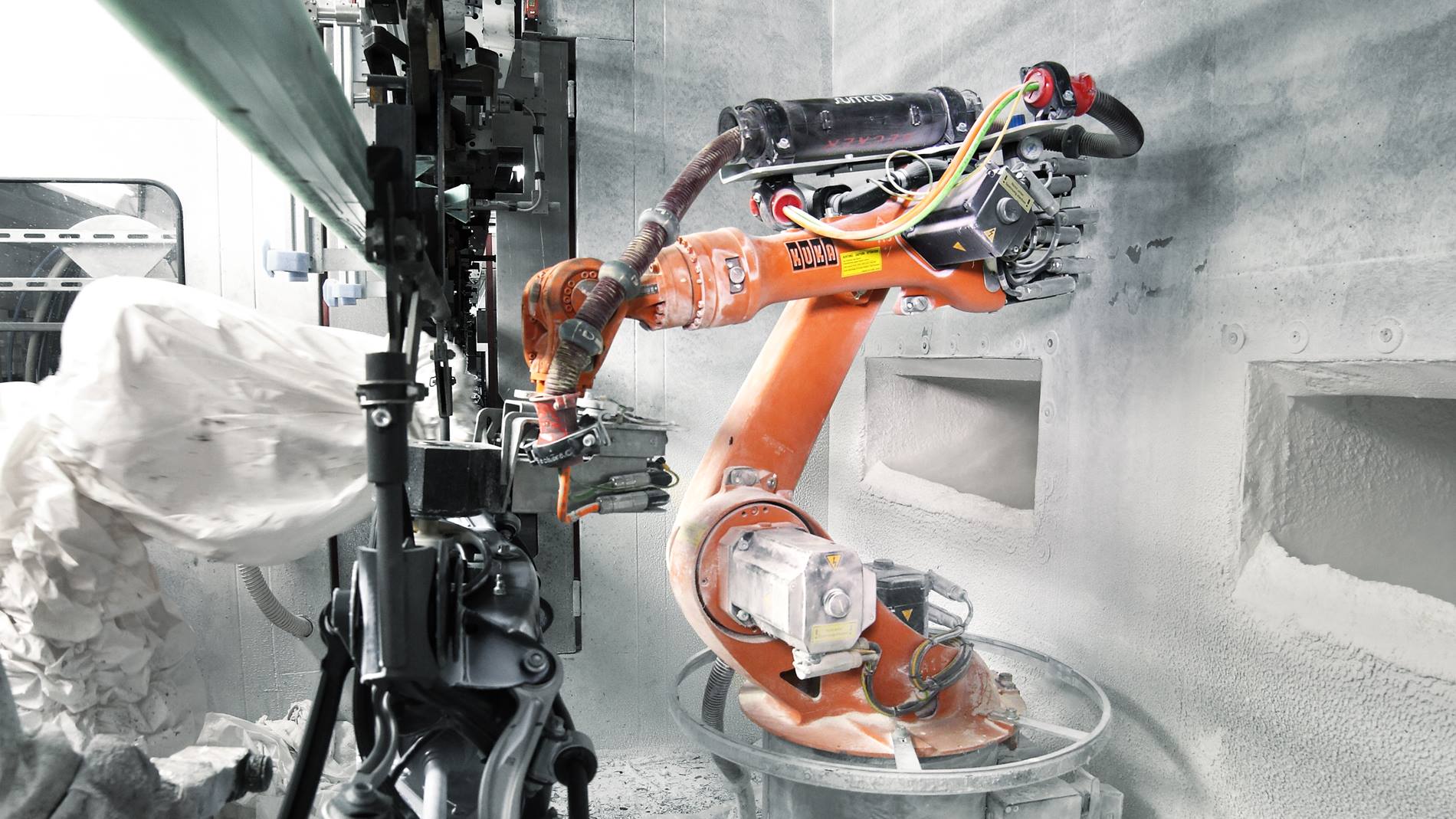
L'asse posteriore viene fissato in un dispositivo di trasporto e trasportato nella cabina di verniciatura in sincronia con il nastro. Nella cabina si trovano due robot di verniciatura, che si occupano della verniciatura rispettivamente del lato sinistro e destro dell'albero motore. Il robot, posizionato di fronte ai due, consente l'innovazione vera e propria: il KR 16-2, ideale sotto il profilo dell'ingombro, della portata, del raggio di azione nonché della protezione antideflagrante, è preposto alla rotazione dell'albero motore della trasmissione.
Mentre la trasmissione posteriore entra nella cabina, il robot si aggancia al relativo accoppiamento e ruota l'asse con un servomotore. Per l'aggancio ad accoppiamento dinamico i tecnici dell'automatizzazione di Erhardt + Abt hanno sviluppato e costruito un alloggiamento a testa sferica esagonale. Grazie alla sua forma, che ricorda quella di un tetto a bulbo, esso sfrutta il principio di una testa sferica a brugola per facili operazioni di aggancio e sgancio con accoppiamento geometrico sicuro per una trasmissione ottimale di forza.
A tal fine il robot deve conoscere la posizione precisa della testa a sfera. Il dispositivo di trasporto si muove di continuo, il che ostacola l'inserimento della trasmissione all'ingresso della cabina (ingresso cella). La sospensione nel trasportatore a catena si muove in tutte le direzioni ed è caotica; persino assi dello stesso tipo sono sospesi in modo diverso e devono essere compensate tolleranze nell'ordine dei centimetri. Inoltre gli assi posteriori vengono approntati per la produzione "just in time", vale a dire diverse serie di modelli in sequenza disordinata.
Per rilevare le coordinate diverse della posizione di aggancio da ciò risultanti, prima di entrare nella cabina di verniciatura viene effettuata una foto della testa a sfera mediante un trigger. Questi dati relativi al nastro vengono quindi trasmessi con l'ausilio di un sistema di elaborazione di immagini ExploRob al controllo robot. Il robot KUKA si aggancia, ruota l'albero finché la verniciatura non viene applicata (dai due appositi robot) perimetralmente e in modo omogeneo e l'asse posteriore non esce di nuovo dalla cabina.