
后轴涂漆的完全自动化
到目前为止,汽车工业中给后驱动轴零件上漆还是得依靠人工操作,因此是非常辛苦而又耗时的过程。多亏有了创新的高科技解决方案和库卡机器人,Erhardt + Abt 的自动化技术人员能够完全实现该过程的自动化。
库卡机器人使得工作任务步入正轨
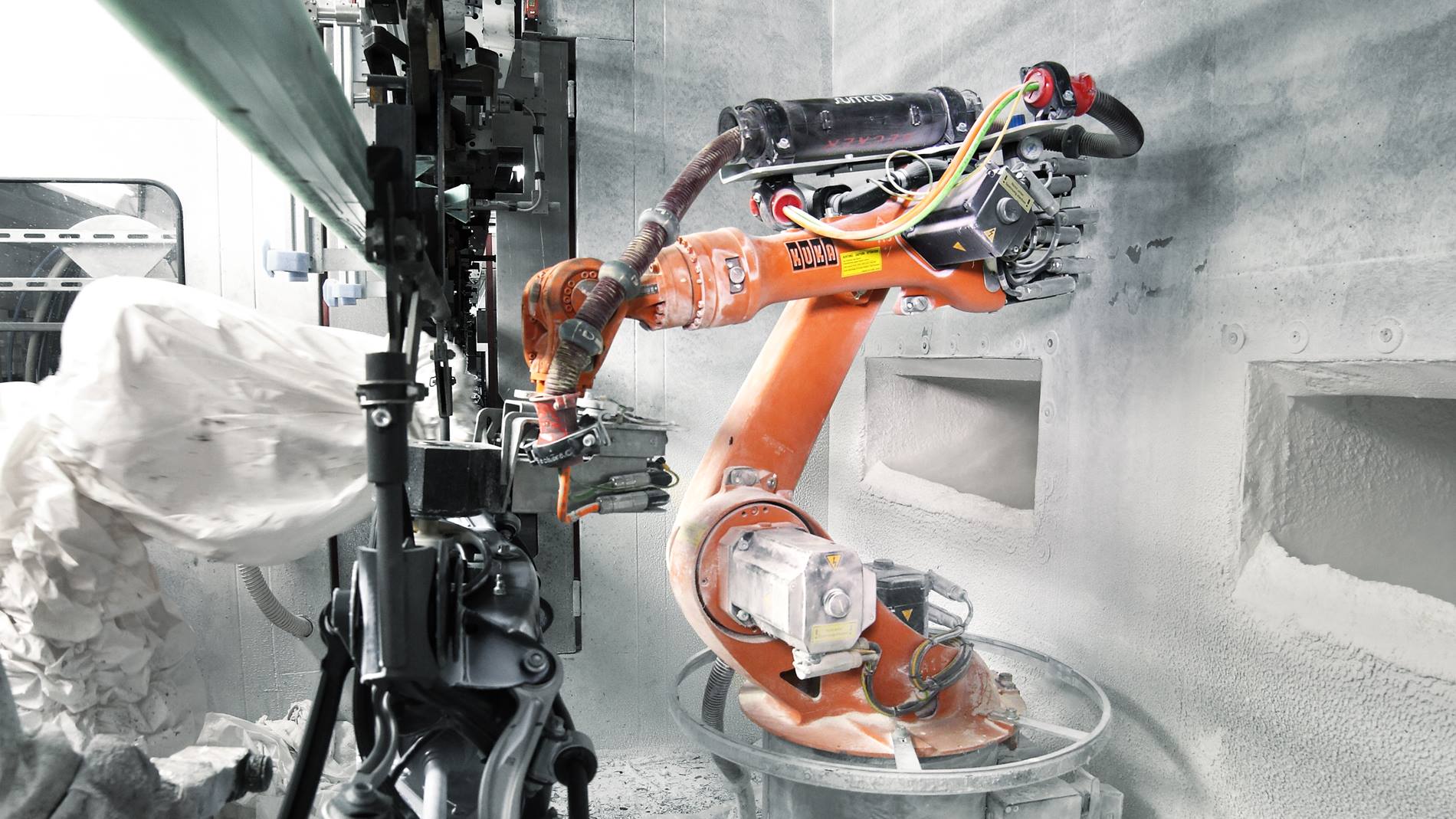
后轴悬挂在输送系统上,并同步传送到涂漆室。涂漆室内装有两台涂漆机器人,一台为驱动轴左侧涂漆, 另一台为驱动轴右侧涂漆。就这样,这两台面对面放置的机器人实现了真正的创新:KR 16-2 的空间要求小,提供理想的有效载荷、作用范围和防爆功能,可用于转动变速装置的驱动轴。
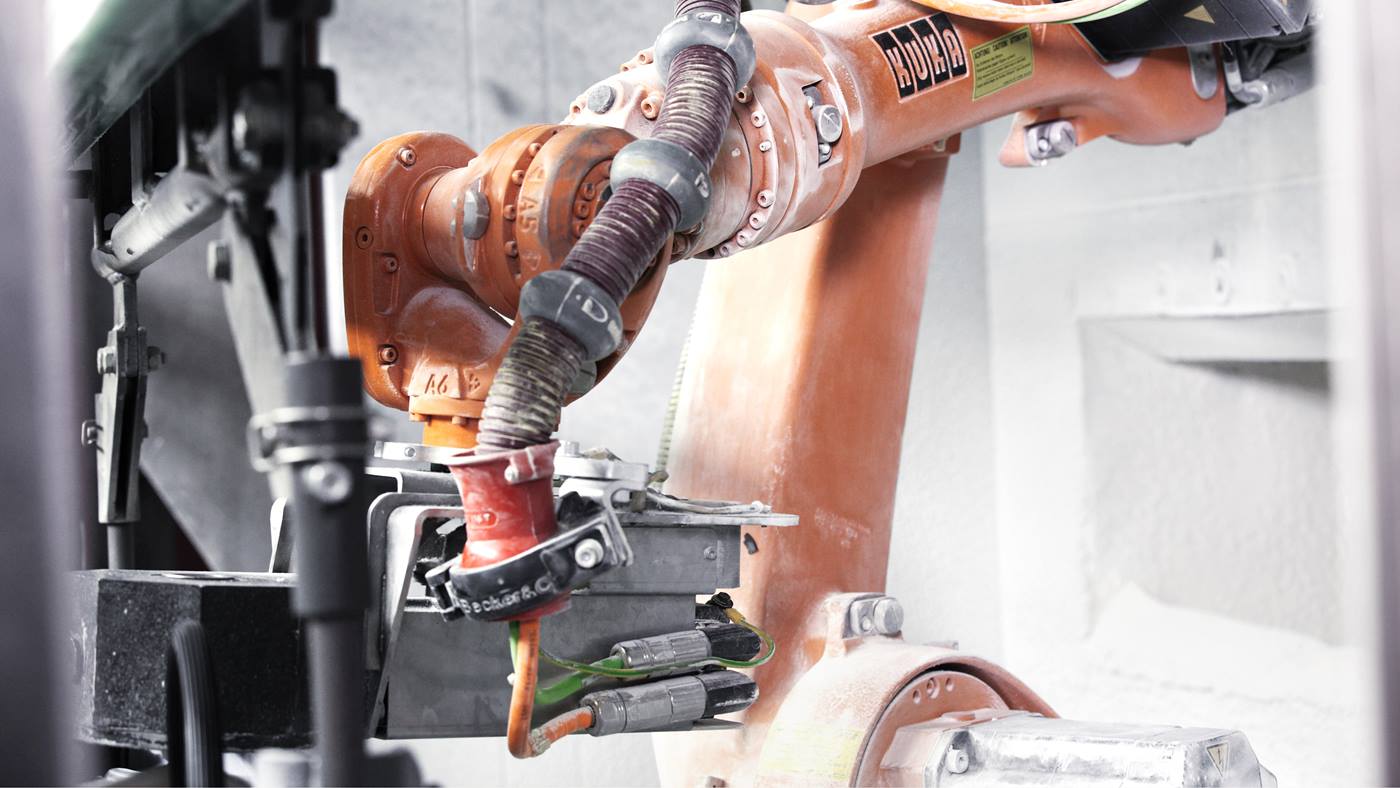
在后轴变速装置穿行过涂漆室时,机器人会与其耦合元件对接,并利用伺服电机转动后轴。为了完成压配合对接,Erhardt + Abt 的自动化技术人员研制出一种六角球头插座。它的形状像一个洋葱形屋顶,运用了带球头内六角扳手的原理,实现轻松安全的适形配合对接和脱离,以确保达到最佳力传递。
为此,机器人必须知道球头的确切位置。由于输送系统持续运行,使得在涂漆室入口处(工作单元入口处)对接变速装置的操作变得更为困难。车轴在链式输送器上的悬挂处于混乱状态,从而产生各个方向上的移动,即使是相同类型的轴也会悬挂得不同。因此,必须补偿几厘米的公差。此外,后轴均以“及时化”方式生产,也就是说不同的产品系列是以未经排序的顺序出现的。
为了确定由此导致的对接位置不同坐标,在进入涂漆室前要通过触发器绘制球头的图像。然后,这些输送器相关数据借助于 ExploRob 图像处理系统,被传给机器人控制器。库卡机器人又对接驱动轴并转动该轴,直到整个表面都被均匀地涂上漆料(由两台涂漆机器人负责);接着,后轴离开涂漆室。