Robot met camera ondersteunt montageproces bij fabrikanten van huishoudtoestellen
Bij de fabrikant van huishoudtoestellen Miele automatiseert een KUKA-robot van het type KR 20 de productie van aandrijfmotoren voor huishoudelijke wasdrogers. Dankzij het camerasysteem werkt de KR 20 in ruime mate autonoom.
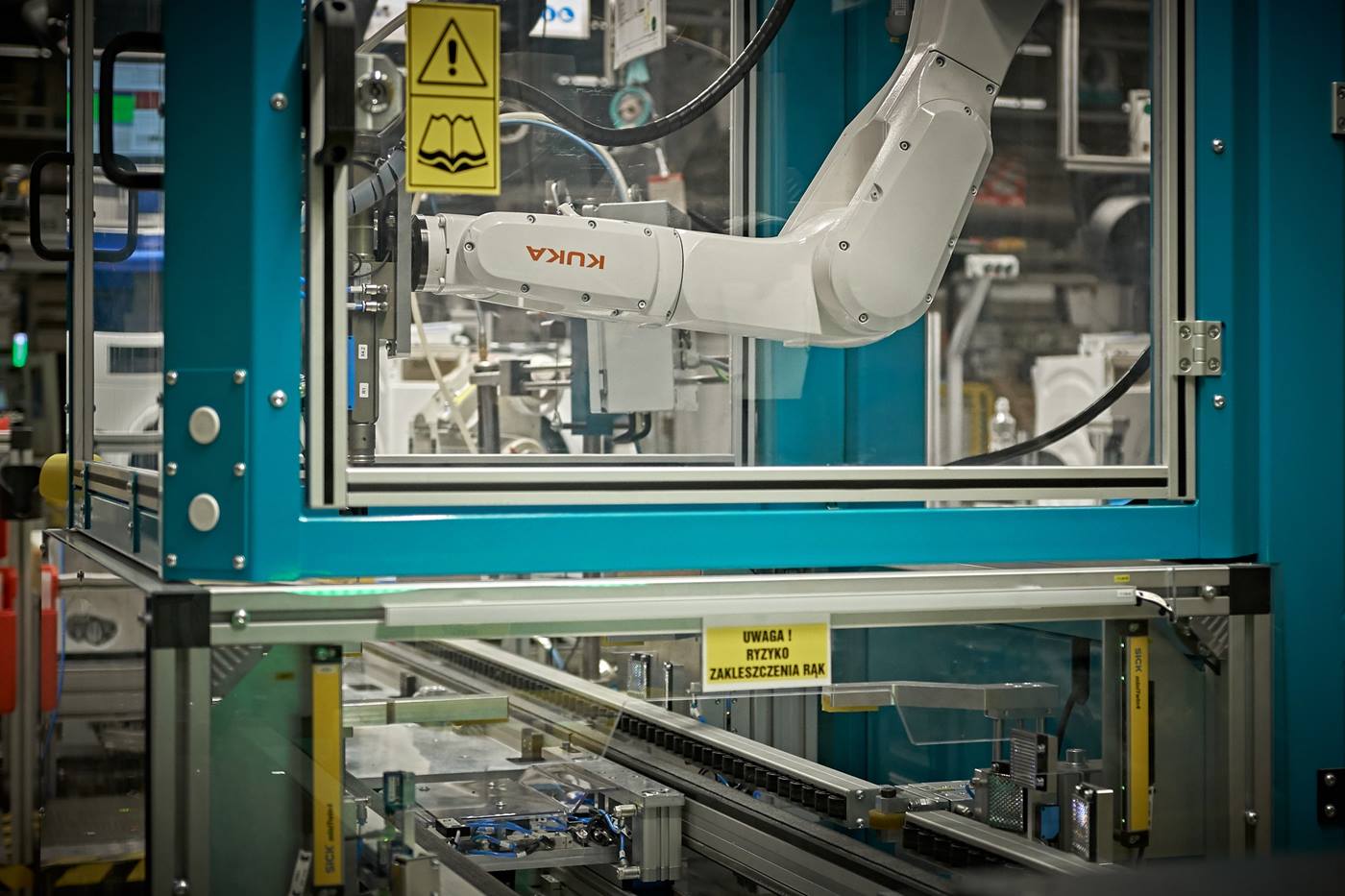
Attentie, dit bereik wordt door een camera bewaakt! Sinds bij de fabrikant van huishoudtoestellen Miele een robot met camerasysteem in gebruik is, is dit motto voor de productie van de onderneming precies van toepassing. De KUKA-robot van het type KR 20 kan zijn omgeving precies waarnemen, daardoor flexibel op nieuwe situaties reageren en toenemend autonoom werken. Zo wordt aangetoond hoe door autonome robotsystemen volledig nieuwe toepassingsmogelijkheden in de productieautomatisering ontstaan.
Robots met camera bieden veel flexibiliteit
De ondernemingen Heinen Automation GmbH & Co. KG alsook ID Ingenieure & Dienstleistungen GmbH hebben samen het palletiseersysteem bij Miele & Cie. KG in de fabriek in het Duitse Euskirchen gepland en gerealiseerd. Een KUKA-robot leidt hierbij cameraondersteund componenten naar de productie. Doorslaggevend criterium voor Miele was de flexibiliteit van de handlingsapplicatie. De robot moet in staat zijn om verschillende componenten te bewerken.

Het was de expliciete wens van Miele om een individuele handlingsapplicatie te realiseren die eenvoudig en snel op verschillende componenten en montageprocessen kan worden omgesteld.
KR CYBERTECH controleert de componenten op fouten
In het middelpunt van de installatie staat een KUKA-robot van het type KR 20 uit de KR CYBERTECH serie. "De opgave van de robot bestaat erin gedeeltelijk geordende statoren geautomatiseerd naar het montageproces te leiden", vat Michael Miessen amen. Statoren zijn motordelen en zijn een deel van de aandrijfmotor voor huishoudwasdrogers. Het bijzondere hierbij: De robotgrijper is met een camera uitgerust. Deze controleert zowel de hoeveelheid van de te bewerken componenten alsook de exacte positie ervan. De controle is nodig omdat de componenten door schokken bij het transport meerdere centimeters van de norm kunnen afwijken. Met behulp van de camera kunnen de afwijkingen herkend en de statoren zonder hulp van de bediener autonoom met de robotgrijper worden opgenomen.

Hoge verwachtingen voor 100 procent vervuld.
Na de controle beweegt de robotgrijper dus over het component en neemt het op. Vervolgens legt de KR 20 het in een omkeerstation neer. De verdere bewerking gebeurt door een handlingsportaal, dat de stator in de warendrager positioneert. Zijn alle kleine ladingdragers geleegd, dan stapelt de robot deze op de uitneemrolgang. Vervolgens worden de pallets uit de installatie getransporteerd.