Robot utrustad med kamera underlättar monteringsprocess hos företag som tillverkar vitvaror och hushållsapparater
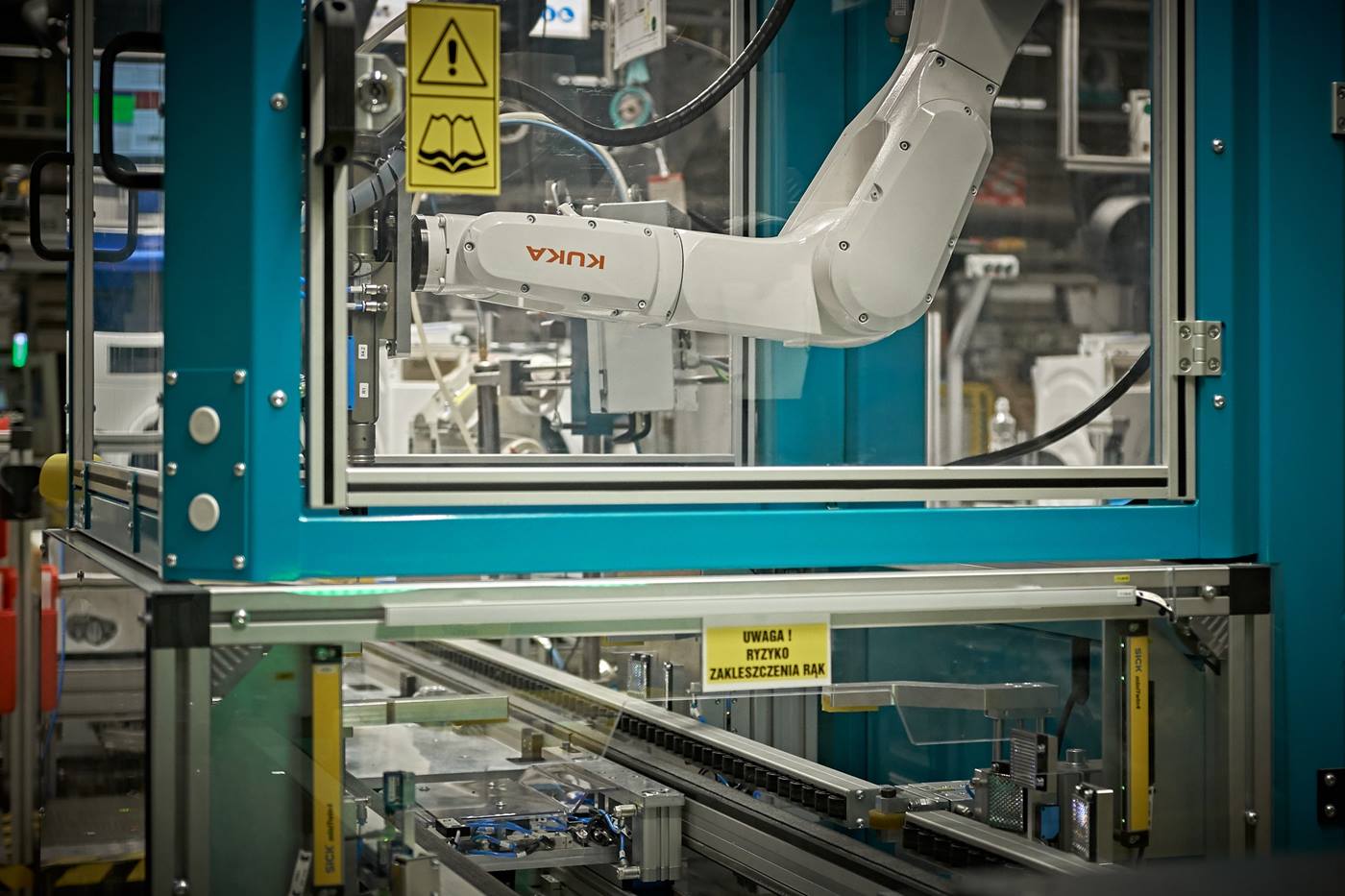
Hos Miele, som tillverkar vitvaror och hushållsapparater, används en KUKA-robot av typen KR 20 för att automatisera produktionen av drivmotorer till företagets torktumlare. Tack vare användningen av ett kamerasystem arbetar KR 20 nästan helt autonomt.
OBS! Området är kameraövervakat. Sedan Miele började använda en robot utrustad med ett kamerasystem så betecknar ovanstående text mycket väl den rådande produktionssituationen hos företaget. KUKA:s robot av typen KR 20 registrerar sin omgivning med hög precision, reagerar flexibelt på nya situationer och arbetar autonomt i allt högre grad. Ett autonomt robotsystem kan öppna upp för helt nya tillämpningar inom automatiserad produktion.
Robot utrustad med kamera erbjuder maximal flexibilitet
Det är de båda företagen Heinen Automation GmbH & Co. KG och ID Ingenieure & Dienstleistungen GmbH som gemensamt har planerat och realiserat palleteringssystemet hos Miele & Cie. KG i deras fabrik i västtyska Euskirchen. Komponenterna tillförs produktionen med hjälp av en KUKA-robot utrustad med kamera. Det avgörande kriteriet för Miele var en flexibel hanteringsapplikation. Kravet var att roboten skulle kunna bearbeta olika komponenter.

Miele ville ha en separat hanteringsapplikation som enkelt och snabbt kan riggas om för olika komponenter och monteringsprocesser.
KR CYBERTECH kontrollerar komponenter avseende fel
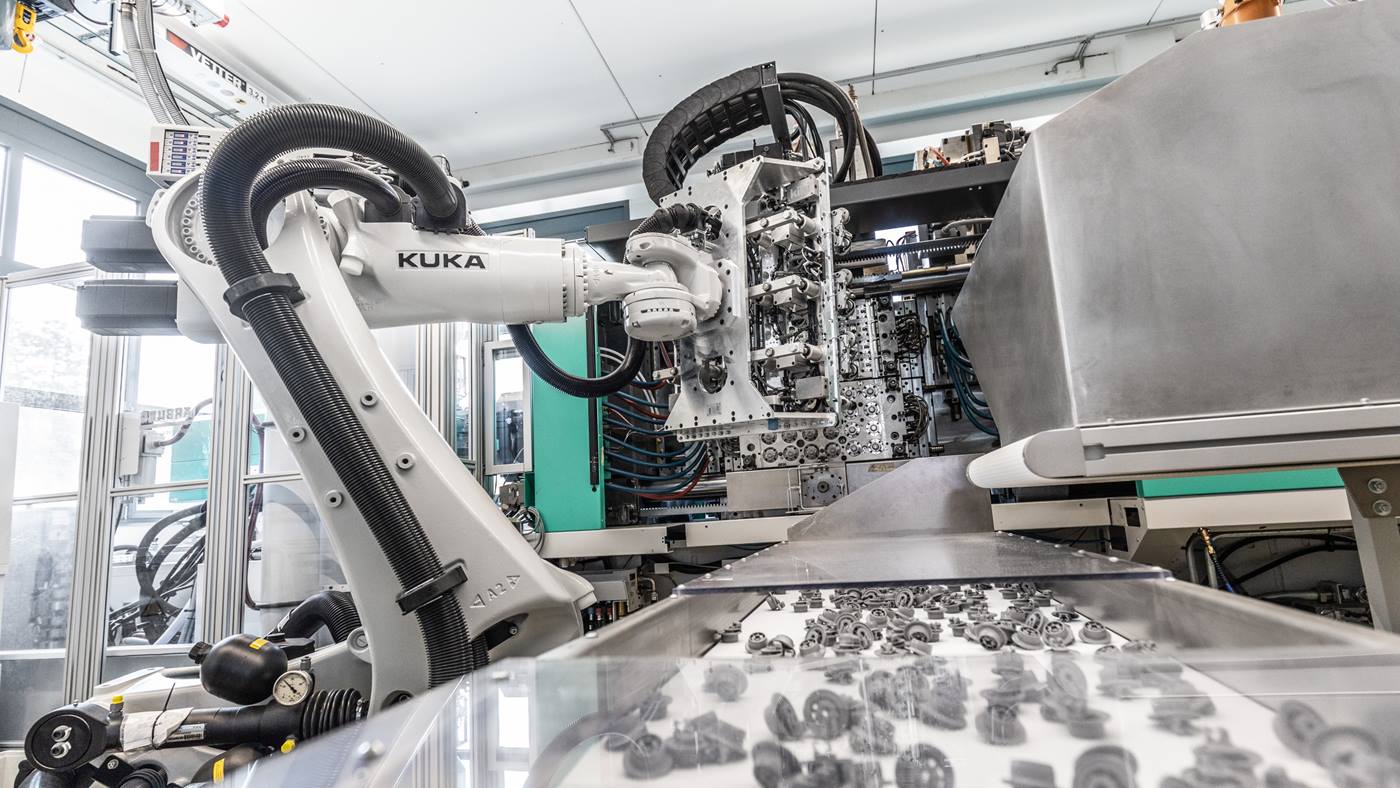
En central del av anläggningen är en KUKA-robot av typen KR 20 från serien KR CYBERTECH. ”Robotens uppgift är att automatiskt tillhandahålla delvis sorterade statorer till monteringsprocessen”, sammanfattar Michael Miessen. Statorer är en motorkomponent som används i drivmotorn på torktumlare. Utmärkande för denna lösning: Robotgrippern är utrustad med en kamera. Denna kontrollerar både mängden komponenter som ska bearbetas och deras exakta position. Kontrollen är nödvändig eftersom komponenterna kan avvika flera centimeter från normen på grund av vibrationer under transporten. Kameran identifierar avvikelserna och robotgrippern plockar upp statorerna autonomt utan medarbetarnas hjälp.

Höga förväntningar – uppfyllda till 100 procent
Efter kontrollen rör sig alltså robotgrippern över komponenten och plockar upp den. Därefter placerar KR 20-roboten komponenten i en vridstation. Den fortsatta bearbetningen sker i en hanteringsportal där statorerna placeras i backar. När alla backar har tömts staplar roboten dessa på uttagsrullbanan. Pallarna transporteras sedan ut ur anläggningen.