Robot s kamerou podporuje montážní proces u výrobce domácích spotřebičů
U výrobce domácích spotřebičů Miele automatizuje robot KUKA typu KR 20 výroba motorů do sušiček pro domácnosti. Díky kamerovému systému pracuje KR 20 maximálně autonomně.
Pozor, tato zóna je sledována kamerou! Od té doby, co se u výrobce domácích spotřebičů Miele používá robot s kamerovým systémem, hodí se toto motto přesně pro výrobu u této firmy. Robot KUKA typu KR 20 dokáže přesně vnímat své okolí, díky tomu reagovat pružně na nové situace a pracovat autonomně ve zvýšené míře. Tak se ukazuje, jak díky autonomním robotickým systémům vznikají zcela nové možnosti využití při automatizaci výroby.
Roboty s kamerou poskytují mnoho flexibility
Firmy Heinen Automation GmbH & Co. KG i ID Ingenieure & Dienstleistungen GmbH společně vyprojektovaly a zrealizovaly paletovací systém u společnosti Miele & Cie. KG v jejím závodě v západoněmeckém Euskirchenu. Robot KUKA podporován kamerou přitom přivádí montážní díly do výroby. Rozhodujícím kritériem pro společnost Miele byla flexibilita manipulační aplikace. Robot by měl být schopen zpracovávat různé montážní díly.

Výslovným přáním společnosti Miele bylo zrealizovat takovou individuální manipulační aplikaci, kterou by šlo snadno a rychle předělat na různé díly a montážní procesy
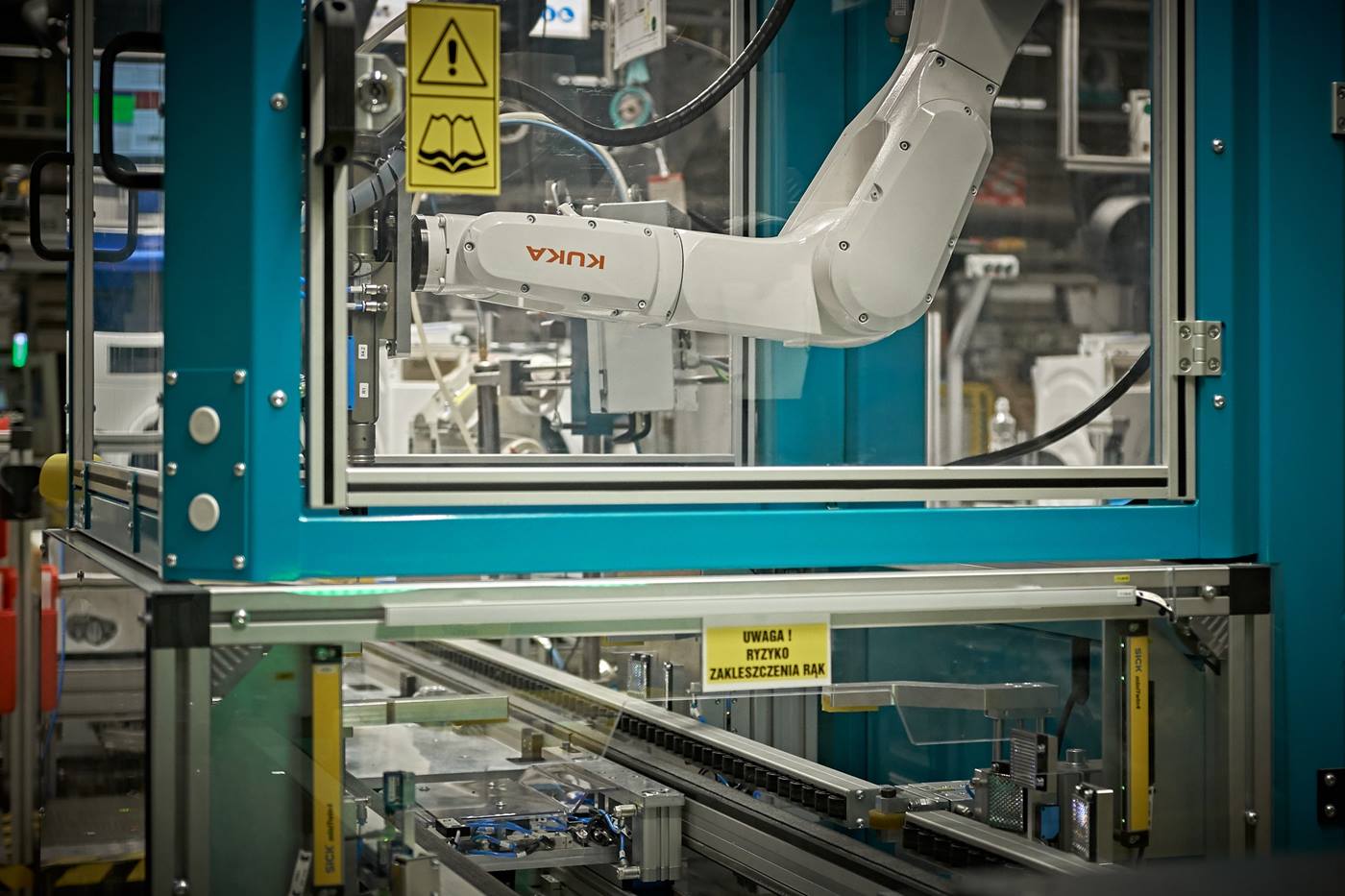
KR CYBERTECH kontroluje montážní díly z hlediska závad
Uprostřed linky se nachází jeden robot KUKA typu KR 20 z konstrukční řady KR CYBERTECH. „Úkolem tohoto robotu je přivádět částečně uspořádané statory automaticky do montážního procesu“, rekapituluje Michael Miessen. Statory jsou motorové díly a tvoří součást motoru do sušiček pro domácnosti. Zvláštností při tom je, že uchopovací zařízení robotu je vybaveno kamerou. Tato kamera kontroluje jak množství zpracovávaných montážních dílů, tak i jejich přesnou pozici. Kontrola je nutná, neboť montážní díly se mohou kvůli otřesům při transportu odchýlit několik centimetrů od normy. Pomocí kamery lze odchylky rozpoznat a statory uchopit bez pomoci dělníka autonomně pomocí uchopovacího zařízení robotu.

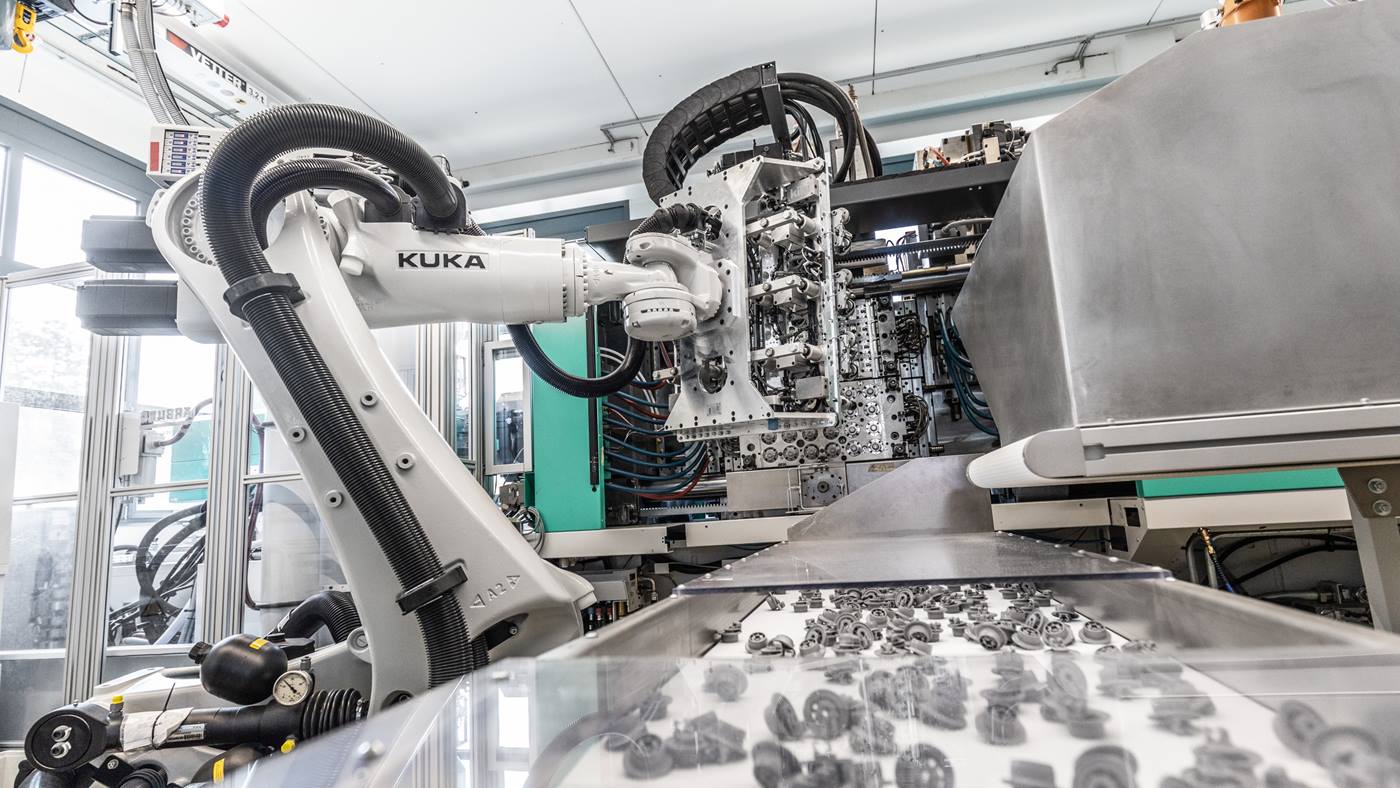
Vysoká očekávání byla splněna na 100 procent
Po ukončení kontroly uchopovací zařízení robotu tedy najede nad montážní díl a uchopí ho. Poté ho KR 20 odloží do obracecí stanice. Další zpracování provádí manipulační portál, jenž umístí stator na nosič obrobků. Jsou-li všechny přepravky KLT vyprázdněny, robot je nastohuje na odebírací válečkový dopravník. Potom se odtransportují palety z linky.