หุ่นยนต์พร้อมกล้องจะสนับสนุนกระบวนการประกอบติดตั้งสำหรับผู้ผลิตอุปกรณ์เครื่องใช้ในครัวเรือน
สำหรับผู้ผลิตอุปกรณ์เครื่องใช้ในครัวเรือนอย่าง Miele หุ่นยนต์ของ KUKA รุ่น KR 20 จะเปลี่ยนการผลิตเครื่องยนต์ขับเคลื่อนสำหรับเครื่องอบผ้าในครัวเรือนให้เป็นระบบอัตโนมัติ KR 20 ทำงานแบบอัตโนมัติได้อย่างครอบคลุมยิ่งขึ้นเนื่องจากมีระบบกล้อง
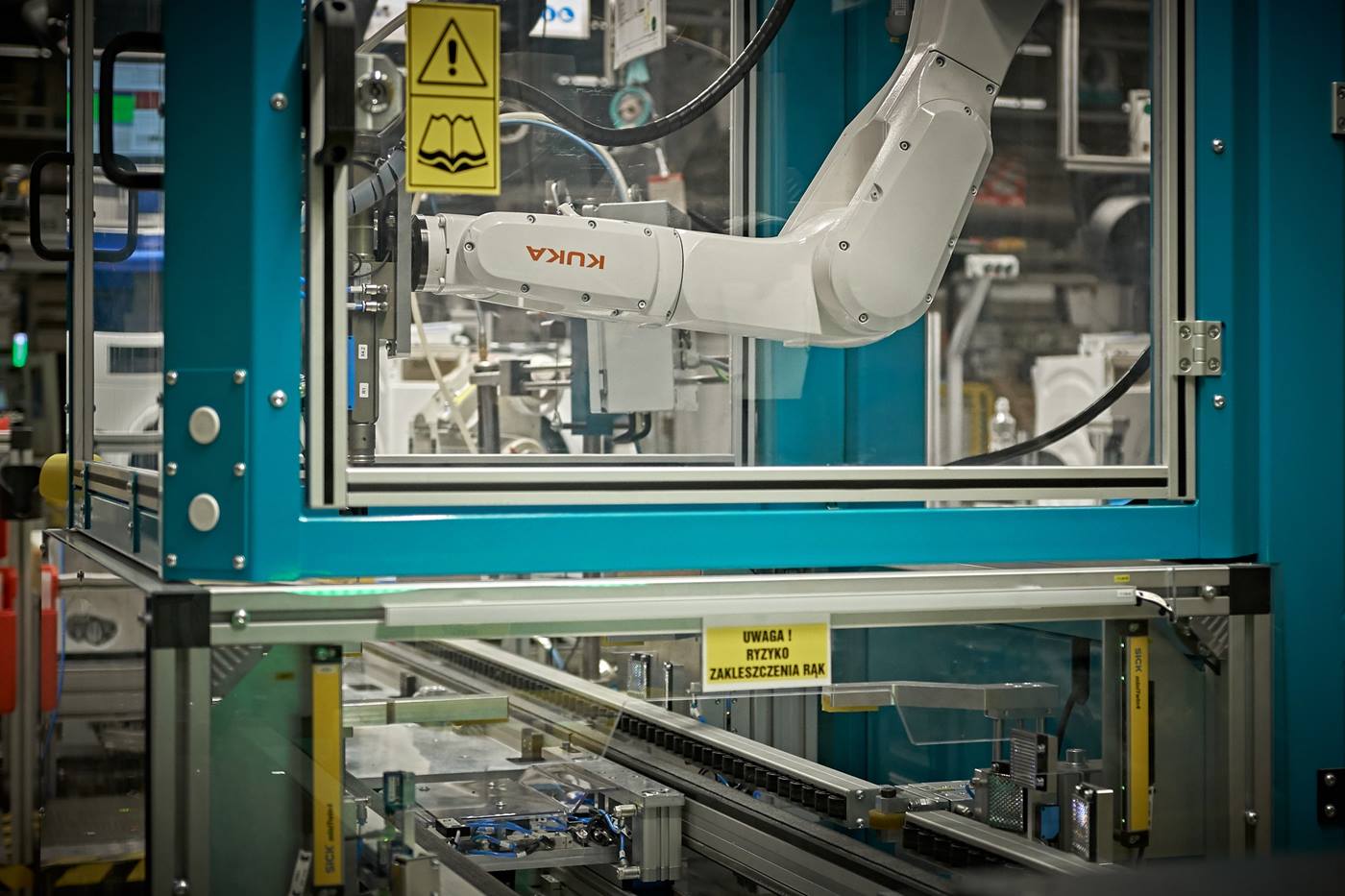
โปรดระวัง บริเวณนี้มีกล้องตรวจจับ! ตั้งแต่ผู้ผลิตอุปกรณ์เครื่องใช้ในครัวเรือนอย่าง Miele มีการนำหุ่นยนต์พร้อมระบบกล้องมาใช้ คำขวัญนี้จึงเหมาะกับการผลิตของบริษัทเป็นอย่างยิ่ง หุ่นยนต์ของ KUKA รุ่น KR 20 สามารถสังเกตการณ์สภาพแวดล้อมได้อย่างแม่นยำ ตอบสนองต่อสถานการณ์ใหม่ได้อย่างยืดหยุ่นและทำงานโดยอัตโนมัติได้มากขึ้น แสดงให้เห็นถึงวิธีการที่ระบบหุ่นยนต์อัตโนมัติช่วยสร้างความสามารถในระบบงานอัตโนมัติสำหรับการผลิตได้อย่างไร
หุ่นยนต์พร้อมกล้องจะให้ความยืดหยุ่นสูง
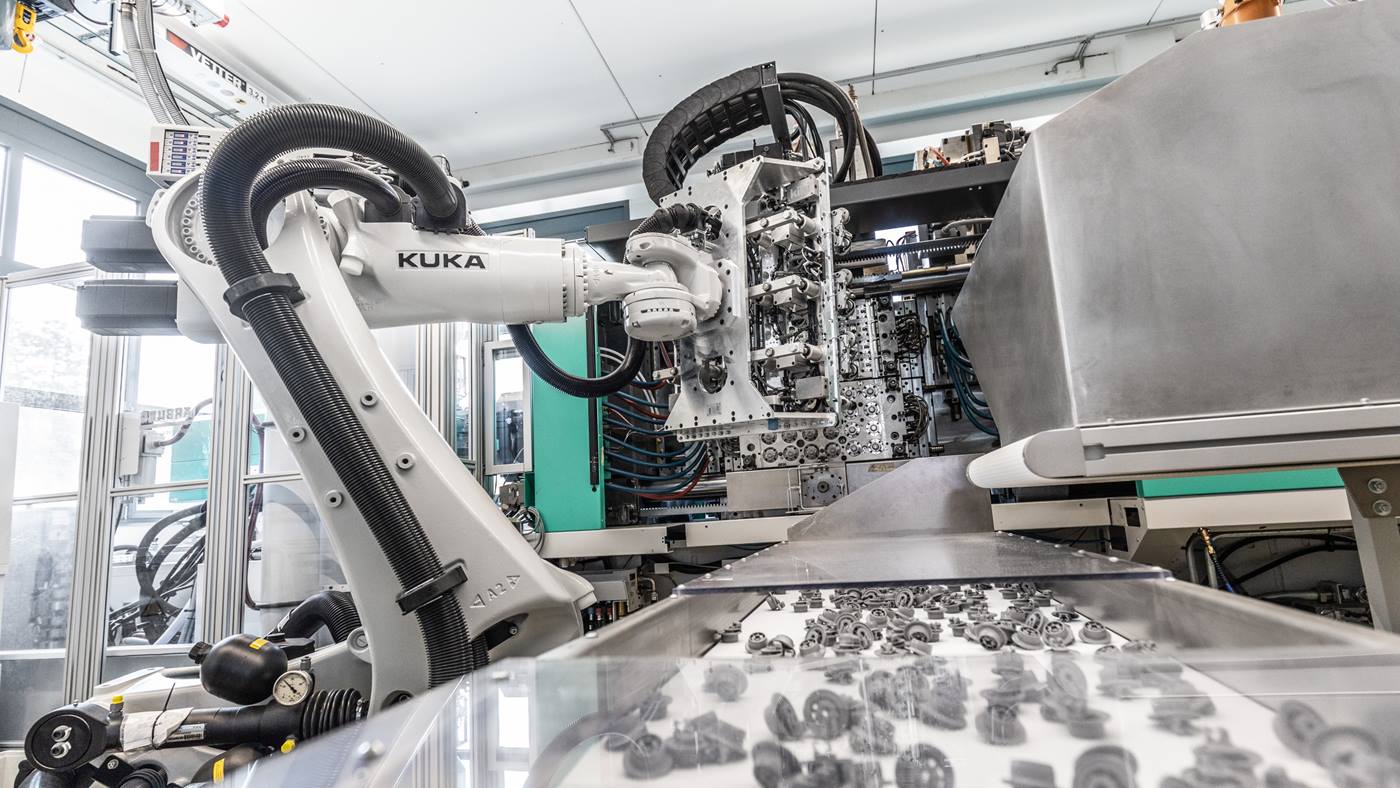
บริษัท Heinen Automation GmbH & Co. KG รวมถึงบริษัท ID Ingenieure & Dienstleistungen GmbH ได้วางแผนและพัฒนาระบบการจัดวางพาเลทร่วมกันกับบริษัท Miele & Cie KG ในโรงงานที่ Euskirchen ฝั่งเยอรมันตะวันตก หุ่นยนต์ของ KUKA จะป้อนชิ้นส่วนประกอบต่าง ๆ เข้าสู่การผลิตโดยใช้กล้อง หลักเกณฑ์ที่สำคัญสำหรับ Miele คือความยืดหยุ่นของระบบงานสำหรับการจัดการ หุ่นยนต์ควรที่จะสามารถจัดการกับชิ้นส่วนประกอบต่าง ๆ ได้

Miele มีความปรารถนาอย่างชัดเจนที่จะทำให้ระบบงานสำหรับการจัดการเฉพาะรายเกิดขึ้นจริงได้ โดยสามารถปรับเปลี่ยนให้เหมาะกับชิ้นส่วนประกอบและกระบวนการทำงานที่ต่างกันได้
KR CYBERTECH ตรวจเช็คชิ้นส่วนประกอบเพื่อหาข้อผิดพลาด
หุ่นยนต์ของ KUKA รุ่น KR 20 จากซีรี่ย์ KR CYBERTECH เป็นหัวใจสำคัญของระบบ “ภารกิจของหุ่นยนต์ก็คือ การป้อนสเตเตอร์ที่จัดเรียงบางส่วนเข้าสู่กระบวนการประกอบติดตั้งด้วยระบบอัตโนมัติ” Michael Miessen กล่าวสรุป สเตเตอร์คือ ชิ้นส่วนอะไหล่ของเครื่องยนต์และเป็นส่วนหนึ่งของเครื่องยนต์ขับเคลื่อนสำหรับเครื่องอบผ้าในครัวเรือน สิ่งที่พิเศษกว่านั้นก็คือ มือจับของหุ่นยนต์มีกล้องอยู่ กล้องจะตรวจเช็คทั้งปริมาณของชิ้นส่วนประกอบที่ต้องใช้งาน รวมถึงตำแหน่งที่แม่นยำของชิ้นส่วน การตรวจสอบเป็นสิ่งจำเป็นเนื่องจากชิ้นส่วนประกอบอาจจะเบี่ยงเบนไปจากเกณฑ์มาตรฐานหลายเซนติเมตรอันเนื่องมาจากการสั่นสะเทือนขณะการขนส่ง สามารถตรวจจับค่าความเบี่ยงเบนได้โดยใช้กล้องและรับสเตเตอร์โดยใช้มือจับของหุ่นยนต์ได้แบบอัตโนมัติโดยไม่ต้องใช้คนงาน

ตอบสนองความคาดหวังที่สูงถึง 100 เปอร์เซ็นต์
หลังจากการตรวจสอบ มือจับของหุ่นยนต์จะเคลื่อนที่ไปเหนือชิ้นส่วนประกอบนั้น ๆ และรับชิ้นส่วนดังกล่าวไว้ จากนั้น KR 20 จะวางไว้ในสถานีกลับชิ้นส่วน พอร์ทัลการจัดการที่กำหนดตำแหน่งของสเตเตอร์ในแคร่รับสินค้าจะช่วยในการดำเนินการต่อไป ถ้านำสินค้าออกจากลังบรรจุระวางบรรทุกขนาดเล็กทั้งหมดแล้ว หุ่นยนต์จะวางซ้อนลังบรรจุเหล่านี้ไว้บนล้อเลื่อนลำเลียงออก จากนั้น จะมีการขนส่งพาเลทออกจากระบบ