配备视觉系统的机器人为家电制造商的装配过程提供支持
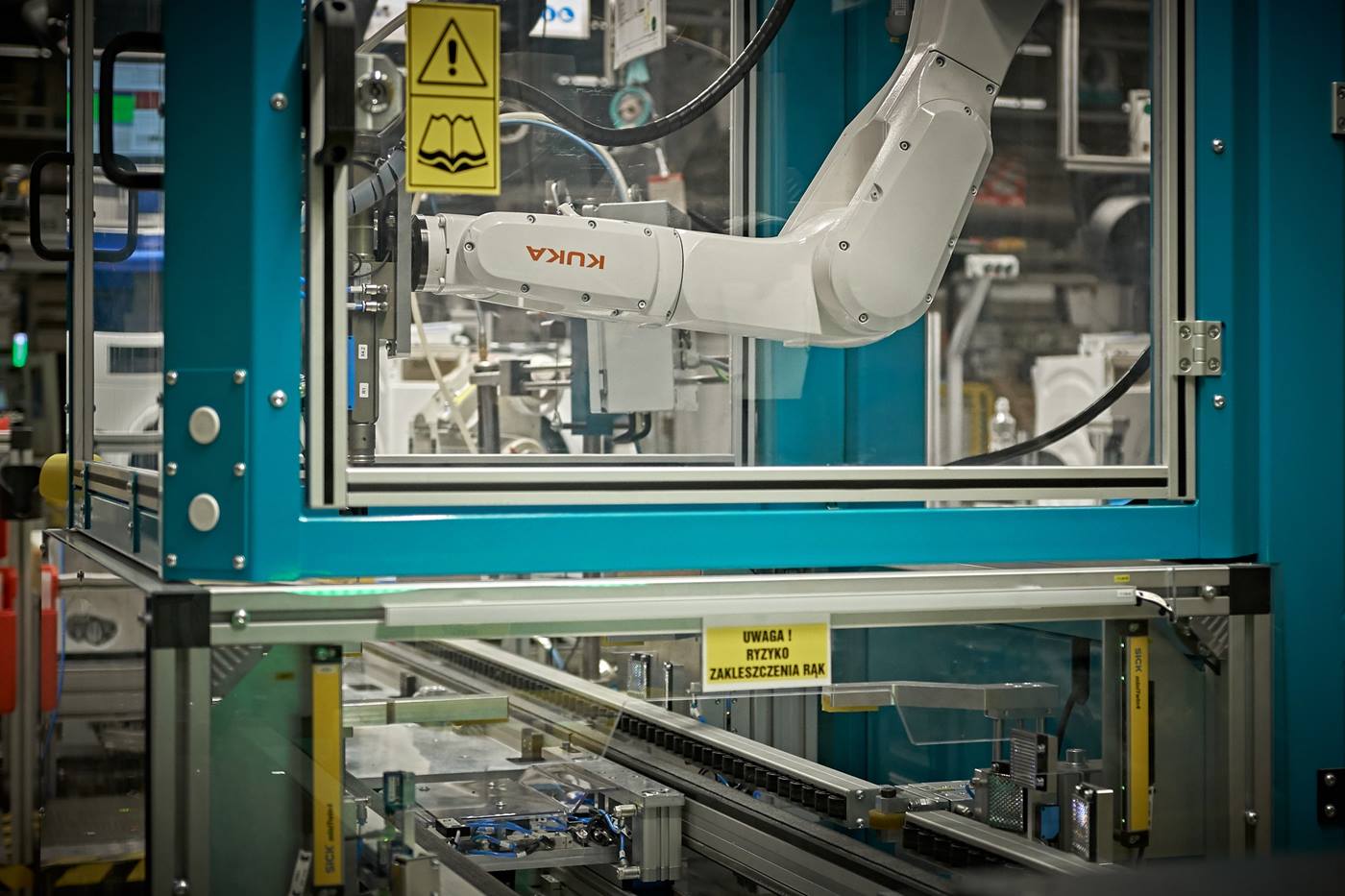
在 Miele 家电制造厂,一台 KR 20 型 KUKA 机器人使干衣机驱动电机的生产实现自动化。由于配备了视觉系统,KR 20 能够大程度地自主作业。
注意:此处为摄像头监控区域!从 Miele 家电制造厂使用配备视觉系统的机器人开始,该提示便切实反映了公司的实际生产状况。KR 20 型 KUKA 机器人可以精准地感知周围环境,因而灵活地应对各种新情况,并且更加自主地进行作业。此例展示了如何通过自主的机器人系统开发生产自动化领域中的全新用途。
配备视觉系统的机器人提供更高的灵活性
Heinen Automation GmbH&Co. KG 和 ID Ingenieure&Dienstleistungen GmbH 共同规划并实施了 Miele&Cie. KG 在西德欧斯基尔辛工厂的卸码垛系统。在该系统中,一台 KUKA 机器人在视觉系统的辅助下输送生产部件。对 Miele 而言,搬运应用系统的灵活性是决定性标准。机器人应当能够处理各种部件。

Miele 明确希望拥有一套可以简单快速地在不同部件和装配过程之间切换的个性化搬运应用系统
KR CYBERTECH 检查部件是否存在缺陷
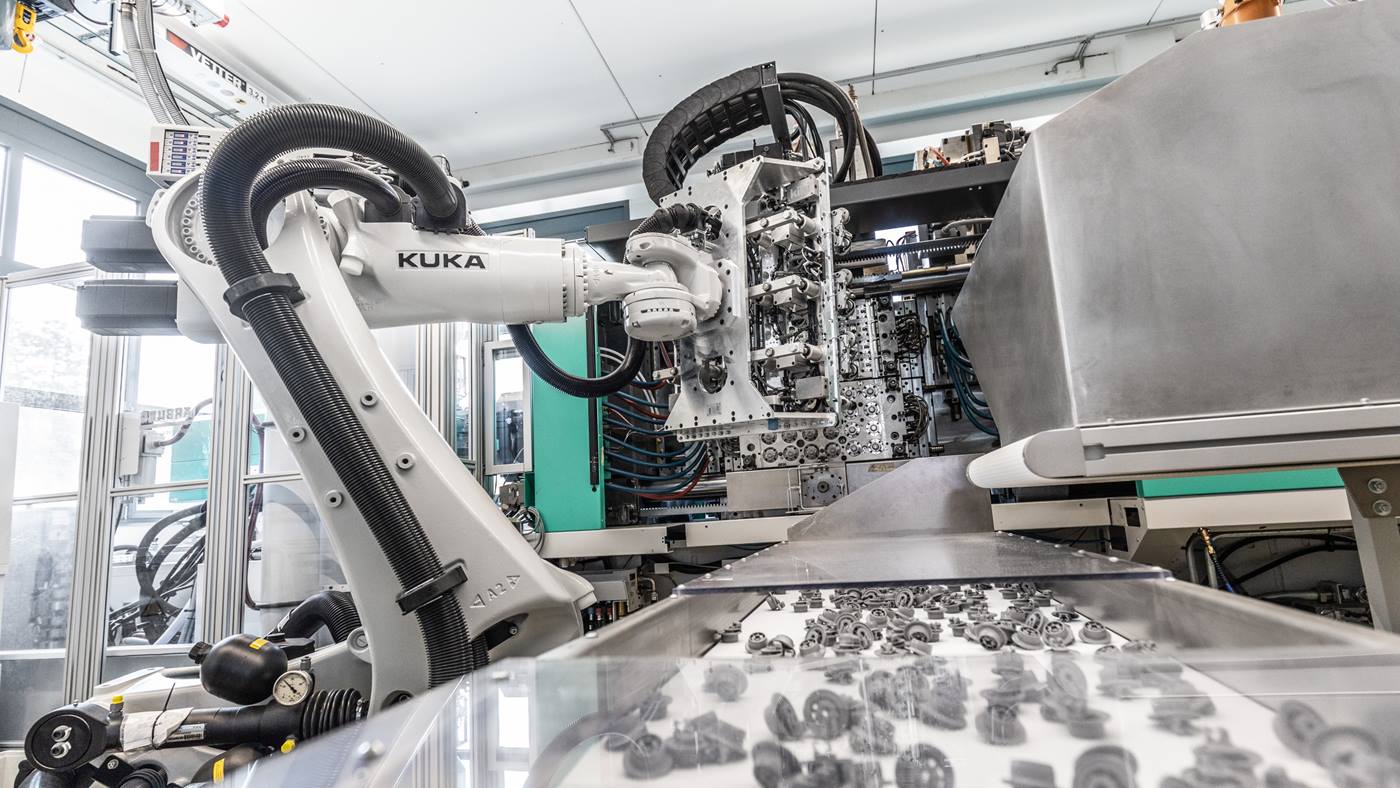
搬运应用系统的核心是 KR CYBERTECH 系列的 KUKA KR 20 型机器人。“机器人的任务是自动为装配过程输送已分类的定子,”Michael Miessen 总结道。定子为电机部件,是家用干衣机驱动电机的组成部分。特别之处在于:机器人抓爪配备了视觉系统。视觉系统检查待加工部件的数量及其准确位置。这项检查是必要的,因为由于运输过程中的振动,部件可能会偏离标准位置几厘米。使用视觉系统,不仅可以识别出位置偏差,还可以在没有工人协助的情况下通过机器人抓爪自动拾取定子。

完全符合期望
检查结束后,机器人抓爪移动到部件上方并拾取部件。然后 KR 20 将部件放置在翻转工位上。通过搬运龙门进行后续处理,将定子定位在货架上。所有小货盘清空后,机器人将其堆垛在卸货辊道上。然后货盘被运出系统。
对机器人的要求非常高,毕竟它需要在一年的 220 天中连续以两班制可靠输送定子。该系统自 2018 年 3 月初起投入运行。“实施得如此顺利,我们感到很高兴。到目前为止,该系统完全符合我们的期望”,Miele 欧斯基尔辛工厂的生产经理 Jürgen Zdunek 说。