ฟังก์ชั่นการทำงานของ KUKA.CNC
- การตั้งโปรแกรมหุ่นยนต์ที่มีการใช้งานด้วย CNC
- การปรับรัศมีของเครื่องมือบนชุดควบคุม
- ประสิทธิภาพในการทำงานบนรางของหุ่นยนต์ดีขึ้น
- วิธีการสำหรับการตั้งโปรแกรมแบบออฟไลน์ผ่านระบบ CAD/CAM
คุณใช้เบราเซอร์ Internet Explorers เวอร์ชั่นเก่า
กรุณาอัปเดตเบราเซอร์ของคุณเพื่อการแสดงผลที่มีประสิทธิภาพสูงสุด

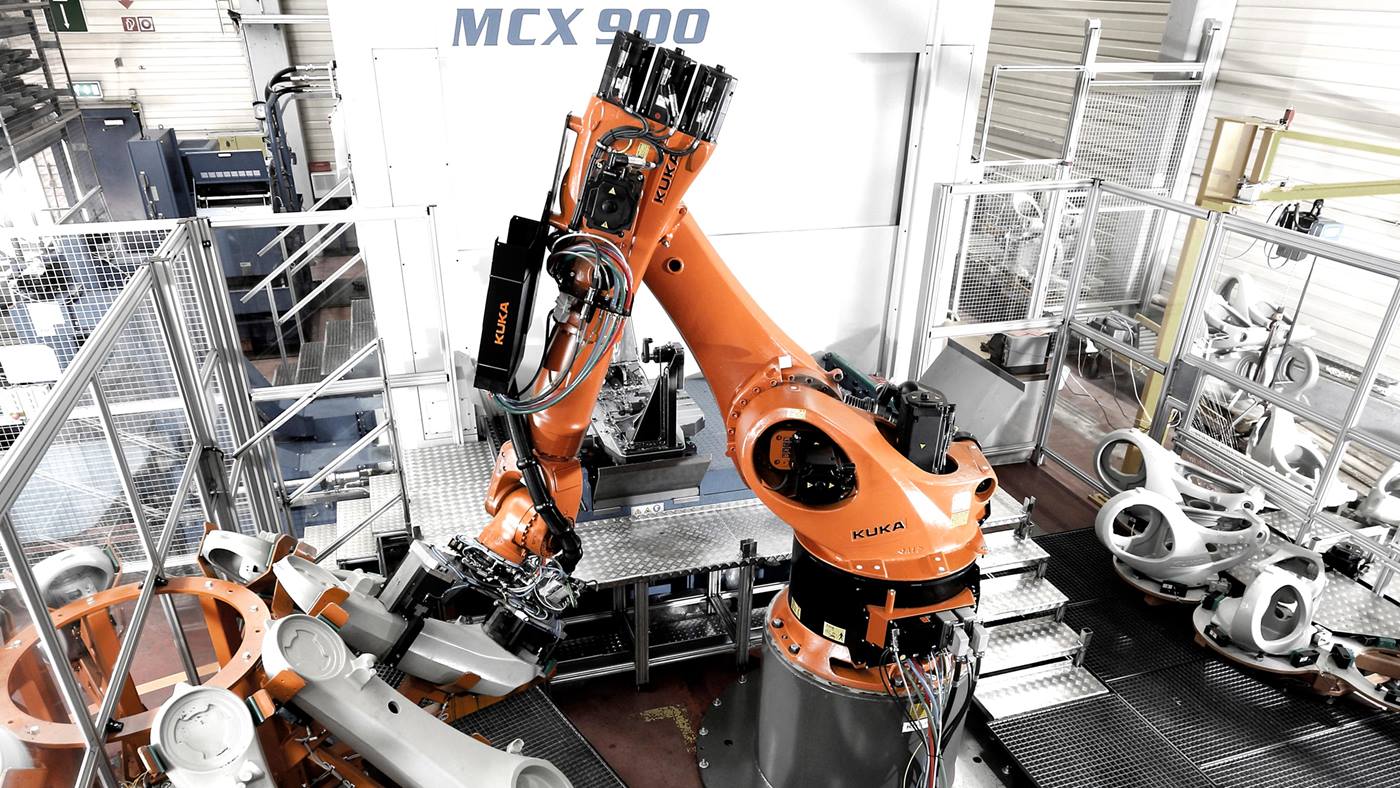
ประสิทธิภาพสูงสุดในการทำงานของหุ่นยนต์: ซอฟต์แวร์ระบบ KUKA.CNC ของเราทำให้ CNC และหุ่นยนต์เชื่อมต่อเข้าด้วยกันได้โดยสามารถได้เหมือนชุดควบคุม CNC โดยทั่วไป
KUKA.CNC มีการติดตั้งเคอร์เนลชุดควบคุม NC ลงบน KR C4 อย่างสมบูรณ์แบบเป็นครั้งแรก จึงสามารถเรียกใช้โปรแกรม NC ได้โดยตรงบนชุดควบคุม KUKA KR C4 สามารถประมวลผลโปรแกรม NC ซึ่งตั้งโปรแกรมแบบออฟไลน์ผ่านระบบ CAD/CAM โดยไม่จำเป็นต้องทำการแปลงเป็นโปรแกรม KRL (ภาษาหุ่นยนต์ KUKA) ก่อน และเรียกใช้พร้อมกับหุ่นยนต์
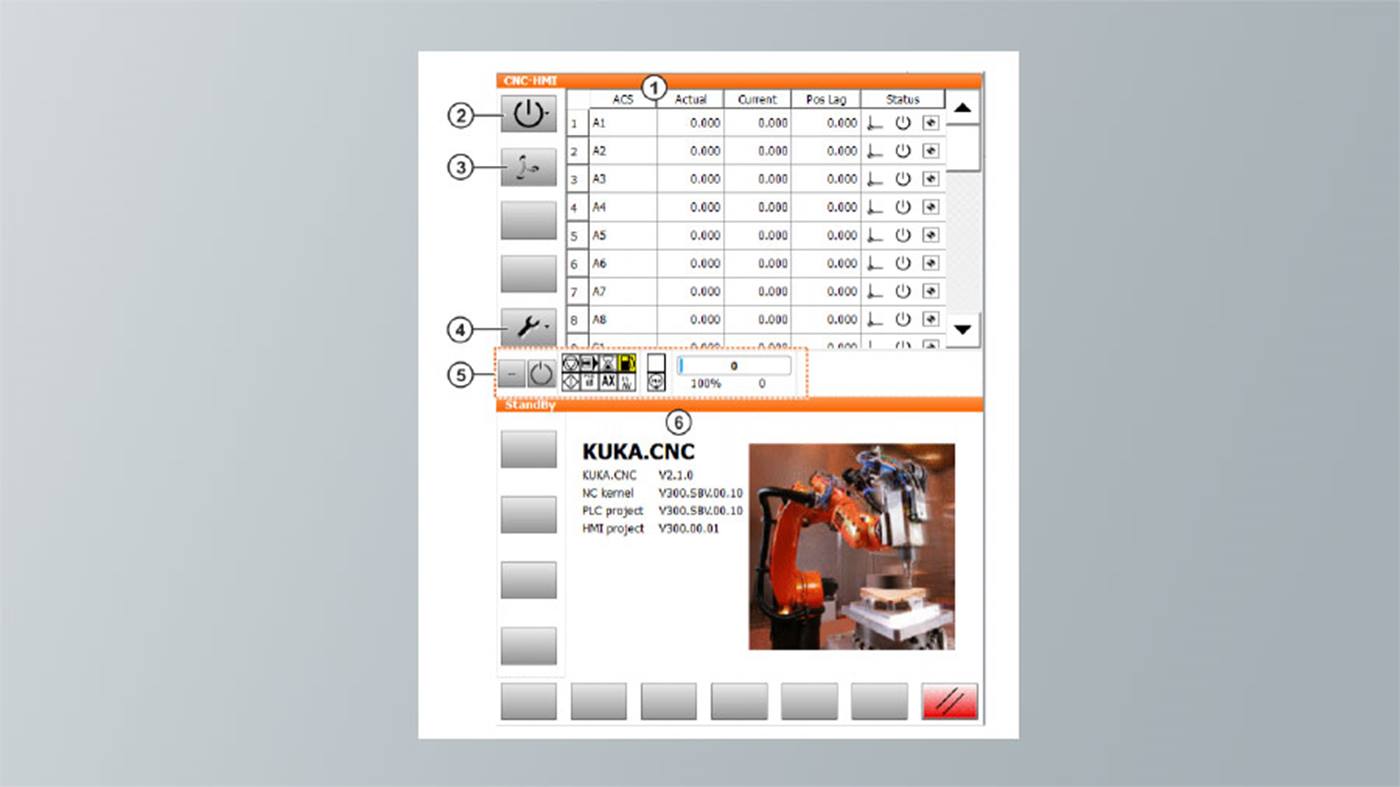
KUKA.CNC ทำให้ KUKA มีอินเตอร์เฟสผู้ใช้ของตนเองเฉพาะ CNC นอกจากเคอร์เนล CNC ดังนั้น smartPAD จึงมีอินเทอร์เฟสควบคุมการใช้งาน CNC-HMI (ระบบควบคุมการใช้งานสำหรับ CNC) นอกจากอินเทอร์เฟสควบคุมการใช้งาน smartHMI สำหรับ KRL (ระบบควบคุมการใช้งานสำหรับ KRL)
อินเตอร์เฟสผู้ใช้ของ KUKA.CNC มีองค์ประกอบทั่วไปในการใช้งานชุดควบคุม CNC เพื่อให้ผู้ใช้งานเครื่องจักรที่มีประสบการณ์การทำงานในสภาพแวดล้อมของเครื่องจักรประมวลผล CNC สามารถควบคุมการใช้งานหุ่นยนต์ CNC ได้ง่ายและรวดเร็ว ชุดควบคุม CNC ทำให้สามารถทำการประมวลผลโปรแกรมขนาดใหญ่ที่ประกอบด้วยชุดโปรแกรมจำนวนมากได้เช่นกัน
มีการประมวลผลโปรแกรมที่มีจุดบนเส้นทางรางหนึ่งล้านจุดสำเร็จมาแล้ว ระยะห่างเล็กน้อยของจุดบนเส้นทาง CNC แต่ละจุด สัมพันธ์กับการวางแผนเส้นทางบนราง โดยยึดตามภาพตัวอย่างของจุดบนเส้นทาง 150 จุด มีการปรับปรุงความแม่นยำของเส้นทางรางและสัดส่วนการเคลื่อนที่บนเส้นทางรางของหุ่นยนต์ KUKA.CNC ให้ดีขึ้นอย่างเห็นได้ชัด