Funções do KUKA.CNC
- Programação do robô baseada em CNC
- Correção do raio da ferramenta na unidade de comando
- Melhor desempenho de trajetória do robô
- Possibilidades para a programação offline via sistemas CAD/CAM
Você está usando uma versão antiga do navegador Internet Explorers.
Para uma visualização ideal, atualize seu navegador

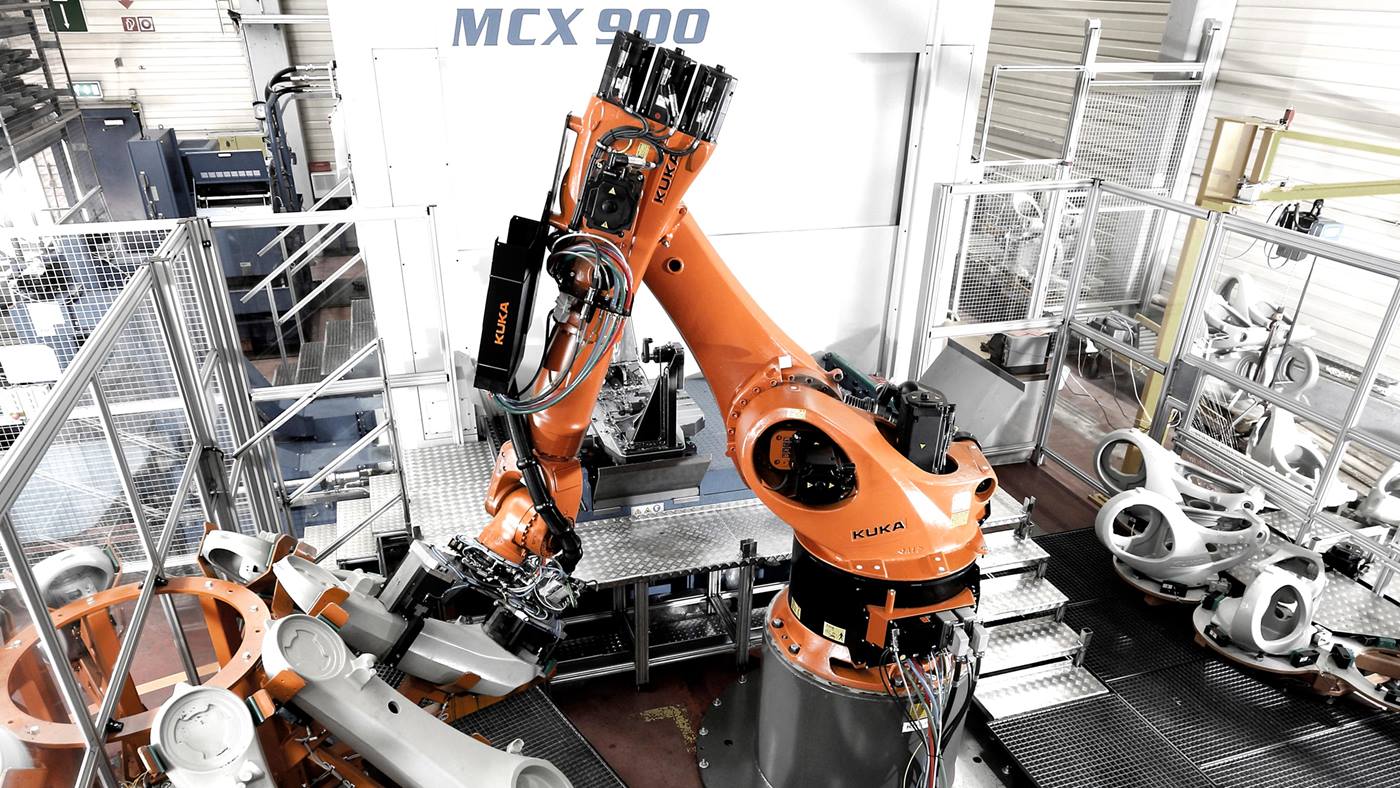
Máximo desempenho do robô: através do nosso software de sistema KUKA.CNC, o CNC e o robô estão unidos diretamente entre si e, portanto, podem ser operados como um comando CNC convencional.
O KUKA.CNC fornece pela primeira vez um núcleo de comando NC totalmente integrado em uma comando de robô KR C5 e oferece com isso a possibilidade de rodar programas NC diretamente na unidade de comando de robô. Os programas NC que foram programados offline através de um sistema CAD/CAM podem ser programados e executados com o robô, sem uma prévia conversão em KRL (KUKA Robot Language).
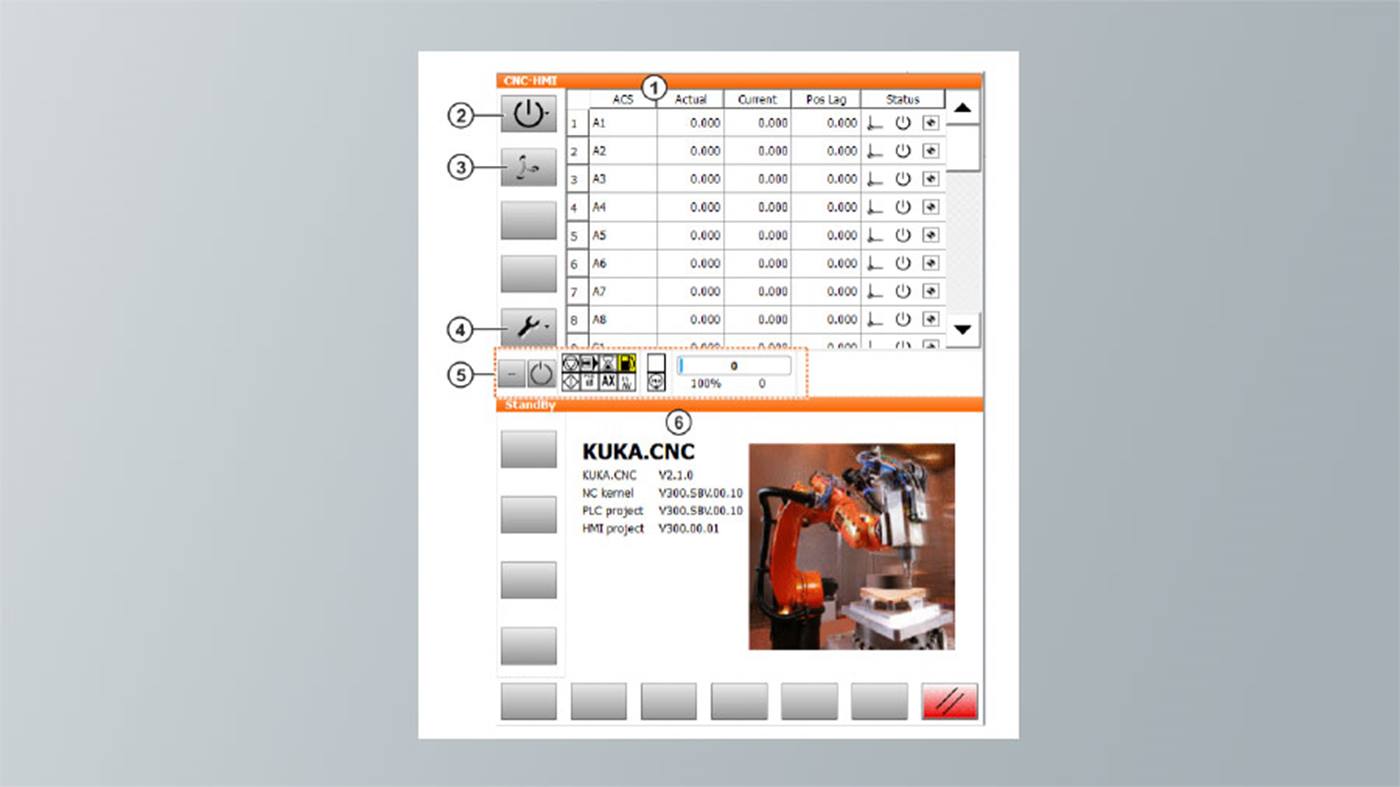
Com o KUKA.CNC, a KUKA oferece, além do núcleo CNC, também uma interface de usuário específica de CNC própria. Com isso, além da interface de operação KRL smartHMI (operação KRL), está disponível no smartPAD a interface de operação CNC, CNC-HMI (CNC operação).
A interface de usuário do KUKA.CNC traz consigo elementos de operação típicos de um comando CNC, para que, sobretudo, os operadores de máquinas, que até então têm experiência no ambiente das máquinas de usinagem CNC, possam assumir de forma simples e rápida a operação do robô CNC. Através do comando CNC agora também é possível processar programas grandes que consistem em muitas sentenças de programa.
Já foram processados com sucesso programas com até um milhão de pontos de trajetória. As pequenas distâncias de trajetória dos respectivos pontos de trajetória CNC em ligação com um planejamento da trajetória, baseado em uma previsão de pontos de 150 pontos de trajetória, melhoram consideravelmente a precisão da trajetória e o comportamento da trajetória de um robô KUKA.CNC.