KUKA.CNCの機能
- CNCベースのロボットプログラミング
- コントローラ上でのツール半径修正
- ロボットの経路パフォーマンスの改善
- CAD/CAMシステムによるオフラインプログラミングのためのオプション
Internet Explorerの旧バージョンのブラウザが使用されています。
最適な表示にするにはブラウザを更新してください

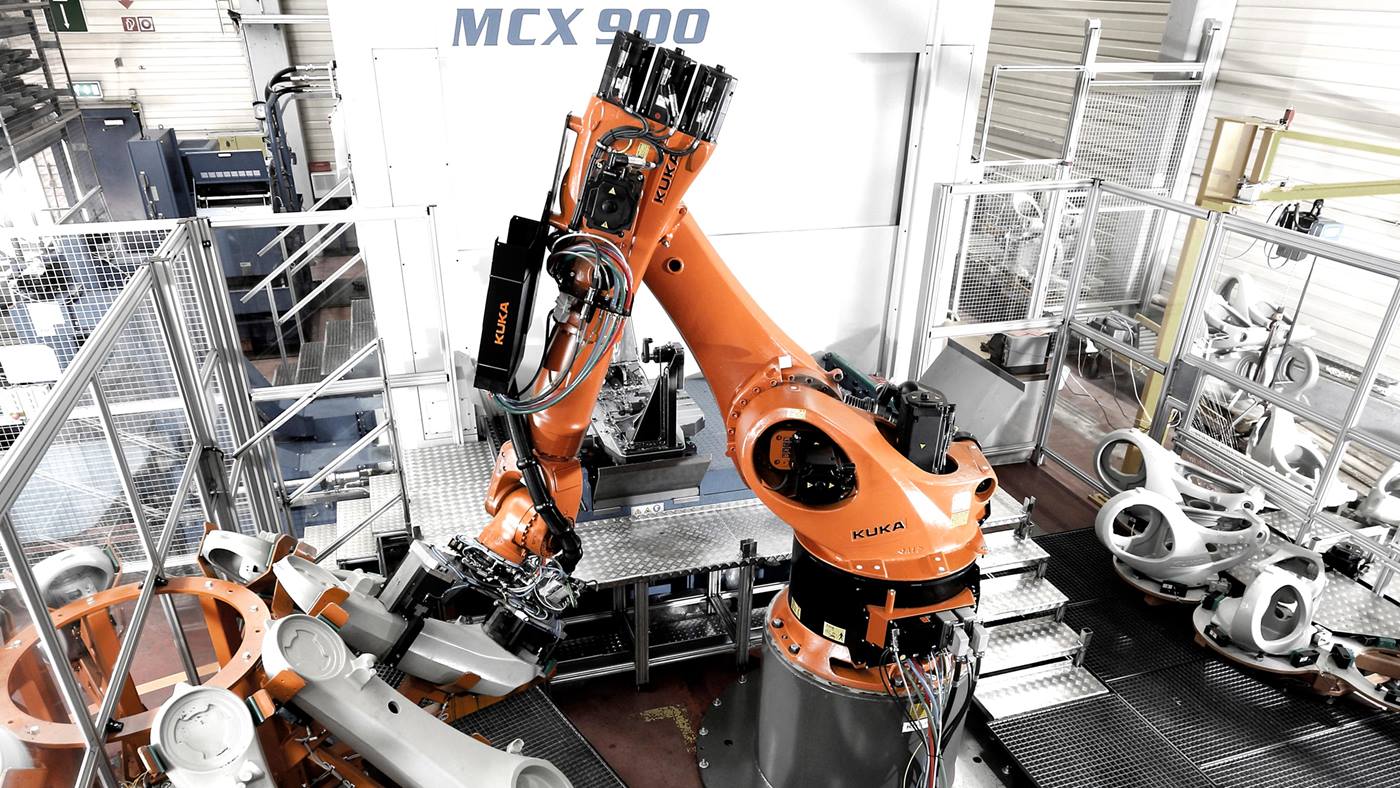
最高のロボットパフォーマンス:弊社のシステムソフトウェアKUKA.CNCは直接CNCとロボットを接続するため、従来のCNCコントローラ同様の操作が可能になります。
KUKA.CNCは初めてNCコントロールコアをKR C5に完全搭載しているため、NCプログラムを直接KUKAコントローラKR C5上で動かせるようになっています。CAD/CAMシステムを使ってオフラインでプログラミングしたNCプログラムは、事前の変換なくKRL(KUKAロボット言語)で編集し、ロボットと動かすことができます。
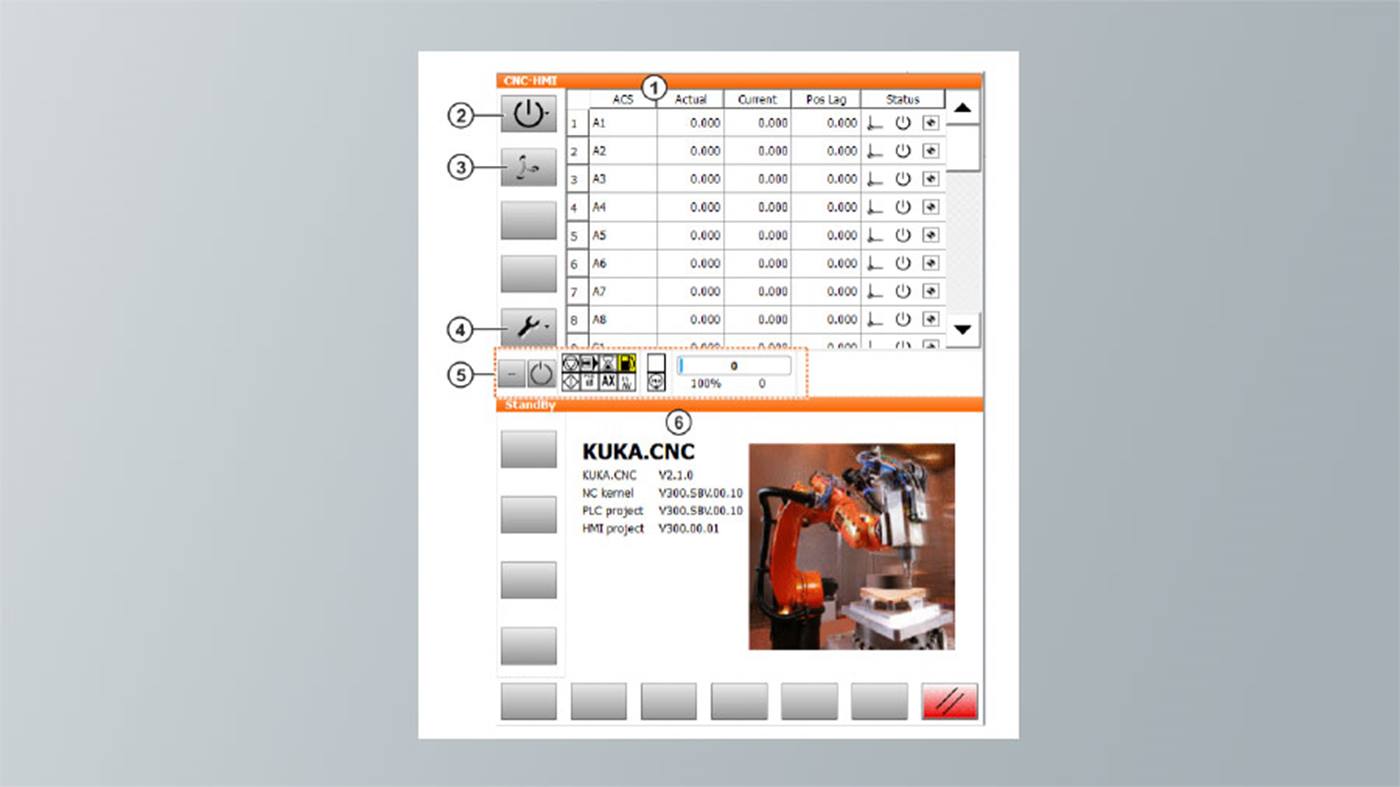
KUKA.CNCでKUKAは、CNCコアの他に独自のCNC特有のユーザーインターフェースを提供しています。これにより、smartPAD上にはKRL操作インターフェースsmartHMI(KRL操作)の他にCNC操作インターフェースCNC-HMI(CNC操作)が用意されています。
KUKA.CNCのユーザーインターフェースには標準的なCNC制御の操作エレメントが装備されているため、特にこれまでCNC加工機械分野で経験を積んできた機械オペレーターが簡単に速くCNCロボットの操作を引き受けられるようになっています。CNC制御により、非常に多くのプログラムブロックから成る大きなプログラムも処理できます。
100万個までの経路ポイントを含むプログラムがすでにうまく処理されました。個々のCNC経路ポイントの間隔を小さくして、経路ポイント150個のプレビューに基づいた経路プランニングと組み合わせることで、KUKA.CNCロボットの経路精度と経路走行動作が明らかに改善されます。