“箱中取物”- Bin Picking
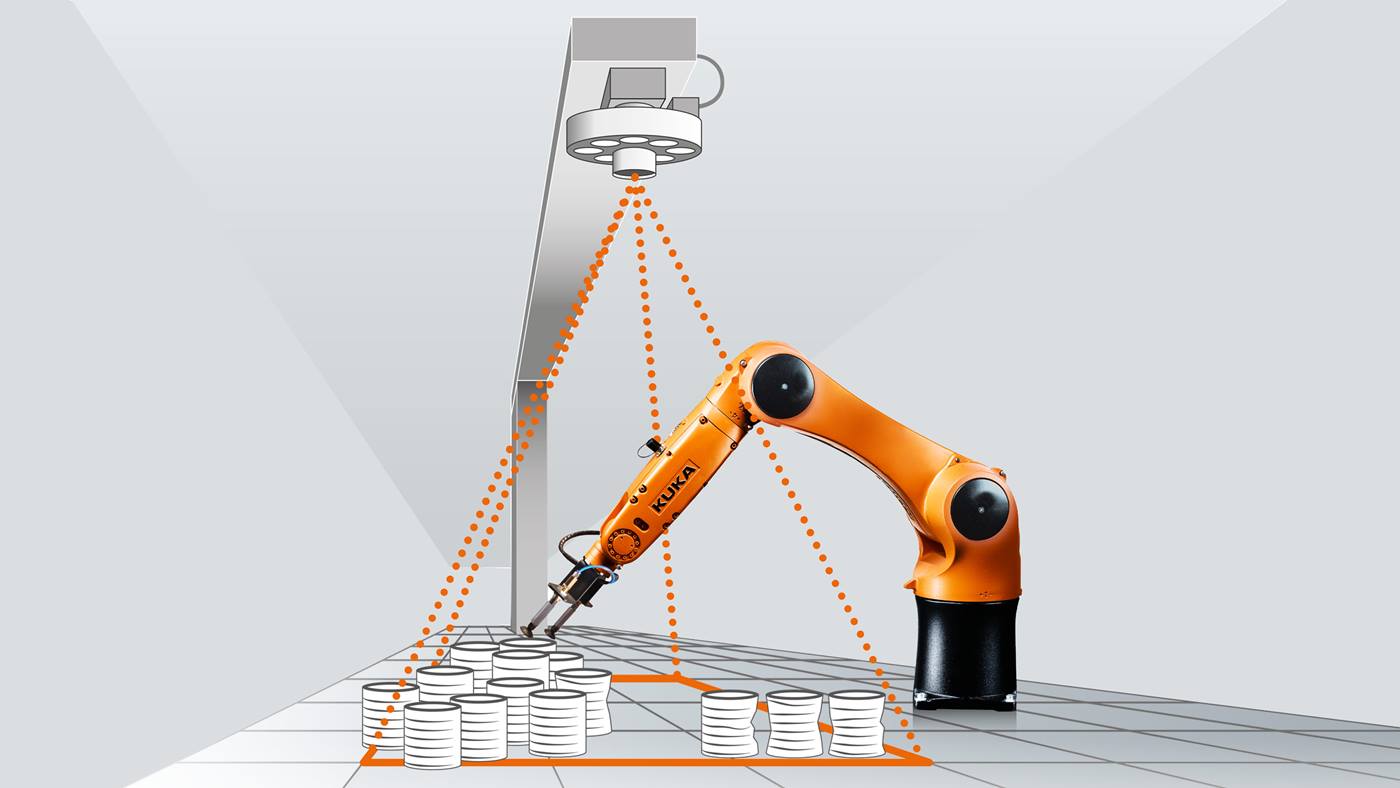
工业机器人的传统作业是指将工件从甲地装载或运输到乙地。制造业的要求和复杂性日益增加,其要求工业机器人除了简单的装卸作业之外,还要能够尽快识别到零件并分辨出其种类。这就是箱中取物技术(Bin Picking)发挥作用的地方。Bin Picking需要分三个步骤进行:首先需识别出随机排列的物体,其次将其取下,最后进行重新放置。

箱中取物技术(Bin Picking)的目地在于自动识别料箱中的物体,并且进行正确抓取。其面临着一大挑战:在大多数情况下,物体通常未分类地混乱排列着。然而,KUKA 可就此根据客户的要求提供整体解决方案。
工业机器人的传统作业是指将工件从甲地装载或运输到乙地。制造业的要求和复杂性日益增加,其要求工业机器人除了简单的装卸作业之外,还要能够尽快识别到零件并分辨出其种类。这就是箱中取物技术(Bin Picking)发挥作用的地方。Bin Picking需要分三个步骤进行:首先需识别出随机排列的物体,其次将其取下,最后进行重新放置。
第一个步骤需要确定零件是处于已分类排列、半分类排列还是混乱放置状态。图像处理系统必须分析环境,并识别各个组件的位置。为此,必须先预定义工件,并且通过 CAD 数据将照明条件等数值导入系统。
在第二个步骤中,图像处理系统的数据会被传输到机器人控制器。随后,控制器将规划出最佳的机器人轨迹和抓取策略。此步骤的主要目标是:抓取所有工件来清空料箱,也就是所谓的 Picking。
最后,机器人小臂会将零件放置在预定义的点,或是将这些零件直接放入下游机床,以进行后续加工。
从 Roboception 智能视觉系统到 MAFU Automation 的 3D 传感器:我们提供各种模块化的解决方案,以便借助箱中取物系统尽可能地提高贵公司作业的灵活性、经济效益并减轻员工负担。我们为抓取系统配备必要组件,以确保在过渡时期也能实现高效平稳的作业。
在需搬运大量散装材料的行业中,从料箱内自动抓取零件的功能得到了广泛应用。由于料箱中的产品经常是散装或未分类的,在搬运产品时,会将 3D 图像处理系统与工业机器人结合使用,以便能够自动搬运各种散装物料。图像处理系统和工业机器人的结合能够带来众多优势,而我们的目标就是将这些优势都发挥出来。
KUKA 提供种类广泛的工业机器人,具有不同的有效负载和工作范围,可满足您的个别具体要求和应用领域。