KR CYBERTECH Edition机器人有助于快速便捷地进入自动化领域
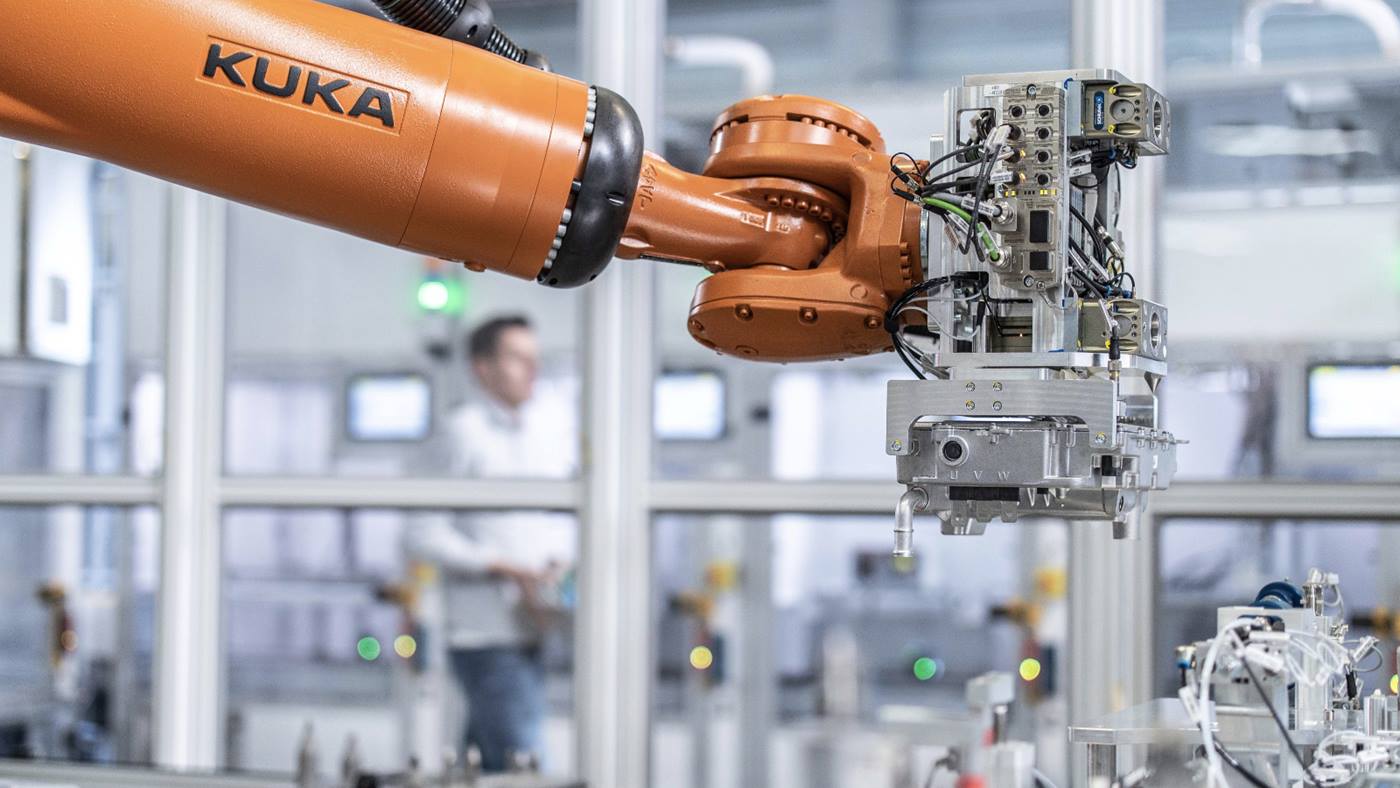
KR CYBERTECH KR 20 E 的有效负载为20kg,作为Edition机器人的主要成员,其经过精简,专注于主要功能,在保持一贯的高质量的同时提供了技术可靠性。这些优良特性使KR 20 Edition机器人成为进入自动化领域和价格敏感型细分市场,成为满足小型企业动态化要求的低成本理想之选。无论是搬运还是检查:KR CYBERTECH KR 20 Edition机器人能够可靠实现自动化。
在低负载等级中,KR CYBERTECH 系列工业机器人能够提供世界范围内齐全、高功率密度的产品系列。该系列与节省空间的单元精简设计理念完美契合,在确保优异性能的同时可以更大程度地降低后续成本。
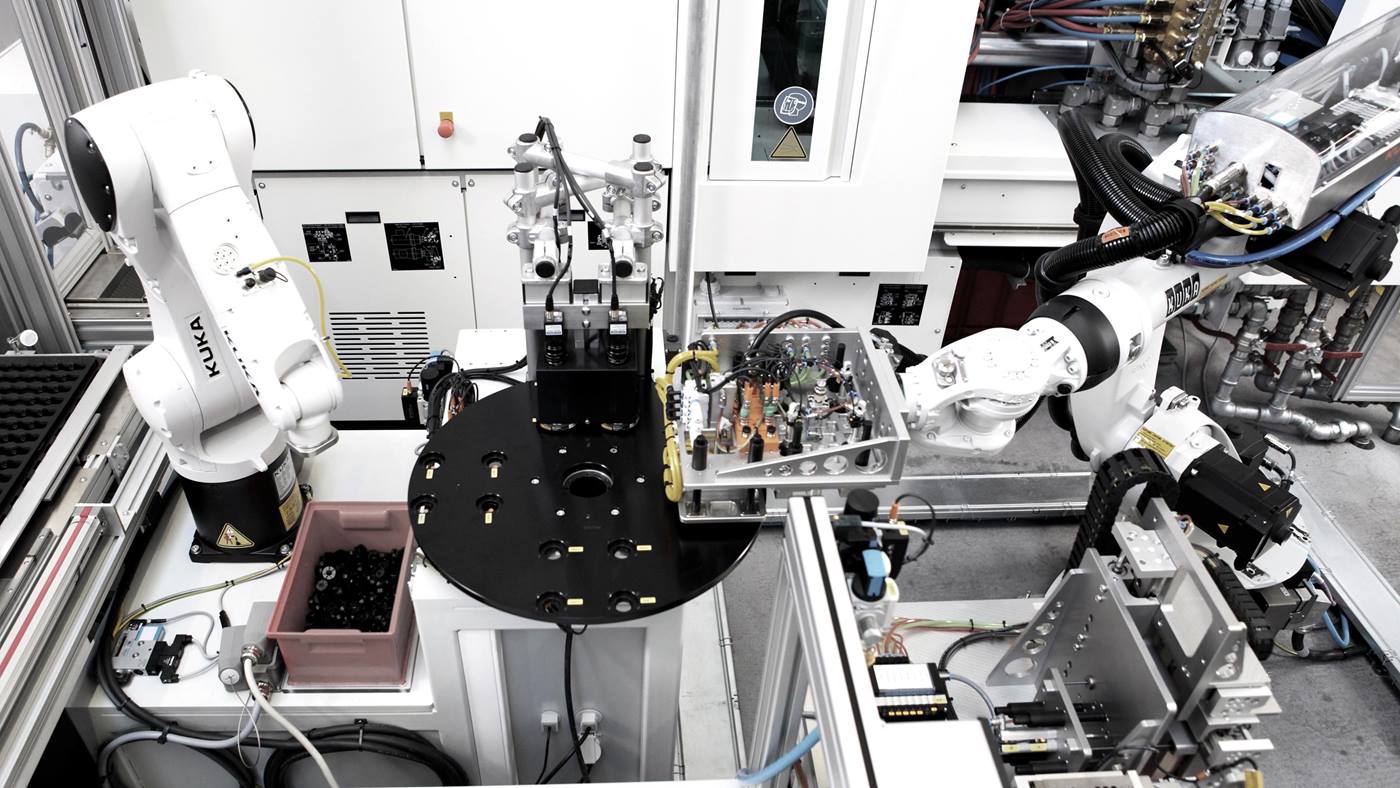
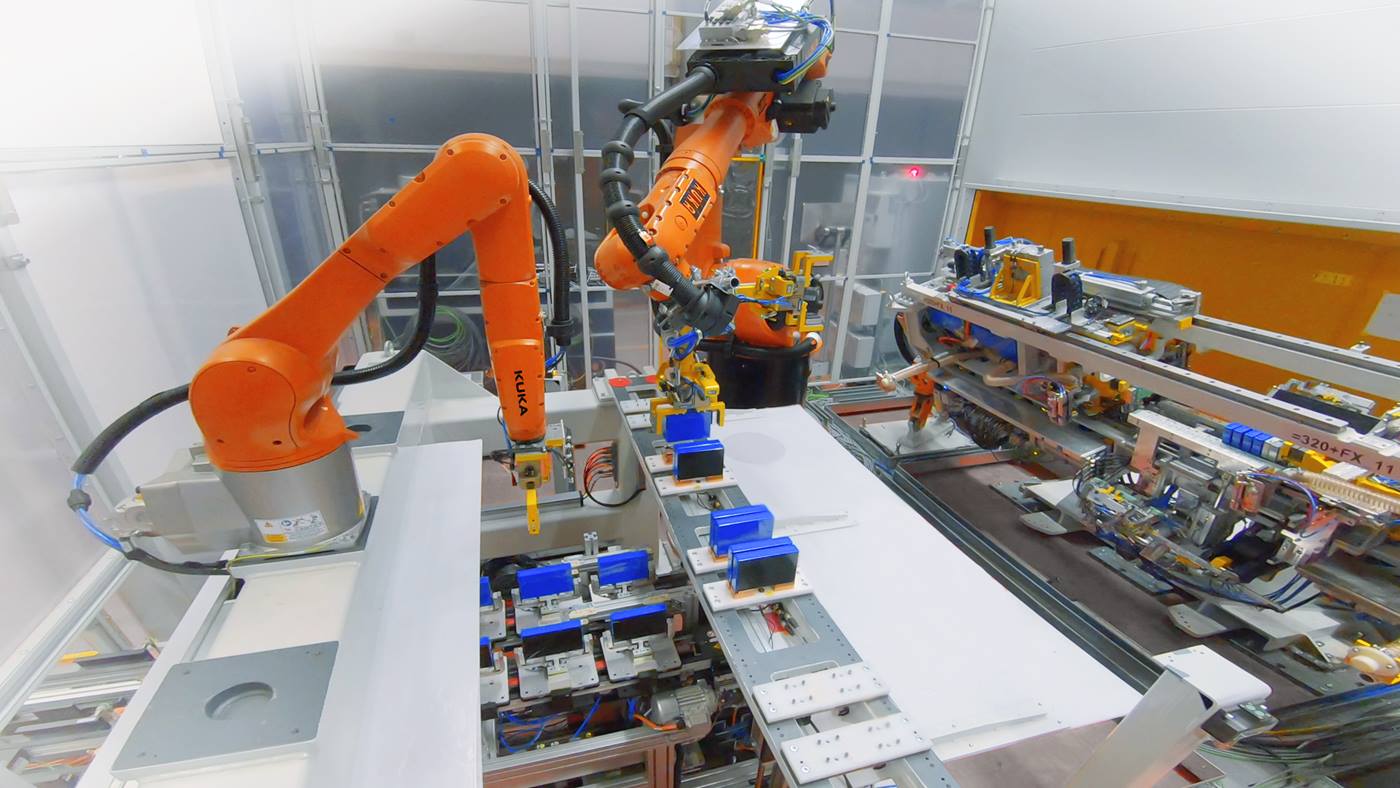
低负荷机器人 KR CYBERTECH 系列下的高性能多功能机器人专门用于搬运应用:搬运大型工件、加工、装配、码垛和保护气体焊接。
低负荷机器人 KR CYBERTECH 系列的关键创新:工业机器人更为紧凑。由此可以提高集成度并减少干扰轮廓,使客户从中获益。请您在广泛的产品组合中为各类应用选择合适的工业机器人。
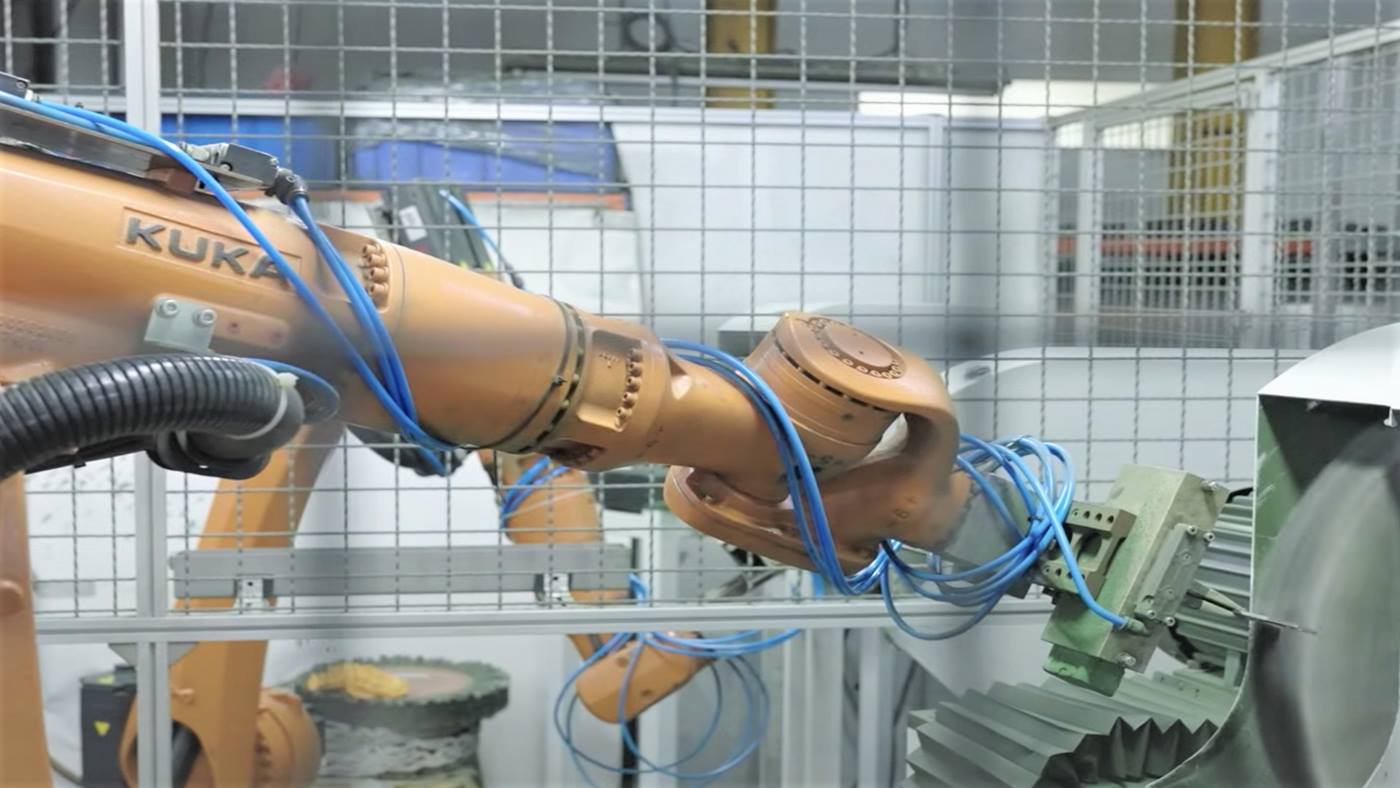
8 - 22 有效载荷
1612 - 2013 可达距离