Bin Picking - 「ボックスに手を入れる」ということ
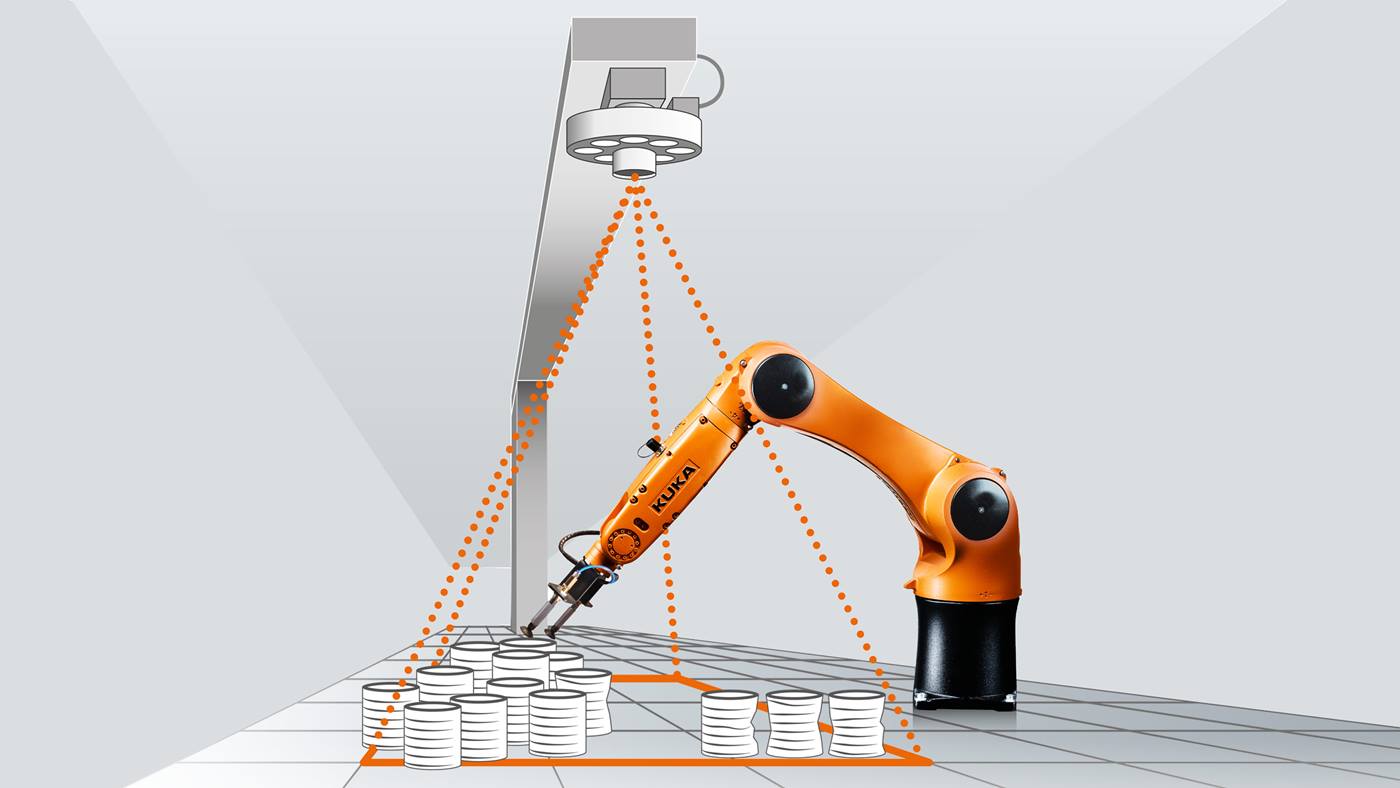
産業用ロボットの従来のタスクは、部品を組み立てたり、ある場所から別の場所へ搬送したりすることです。製造業における要求の高まりと複雑化に伴い、産業用ロボットには単純な装填・取外しに加えて、可能な限り最速で部品を認識・識別することが求められています。そこで活躍するのが、Bin Pickingです。直訳すると「ボックスに手を入れる」という意味で、ランダムに配置された物体の認識・取出し・再配置3つのステップで行われます。
Internet Explorerの旧バージョンのブラウザが使用されています。
最適な表示にするにはブラウザを更新してください

ここでは、容器の中にある物を自動で認識し、掴んで取り出すということが重要です。ここでの課題は、物体がほとんど無秩序に配置されているということです。KUKAは、お客様のご要望に応じた完全なソリューションを提供します。
産業用ロボットの従来のタスクは、部品を組み立てたり、ある場所から別の場所へ搬送したりすることです。製造業における要求の高まりと複雑化に伴い、産業用ロボットには単純な装填・取外しに加えて、可能な限り最速で部品を認識・識別することが求められています。そこで活躍するのが、Bin Pickingです。直訳すると「ボックスに手を入れる」という意味で、ランダムに配置された物体の認識・取出し・再配置3つのステップで行われます。
まず、部品が構造化されているか、半構造化されているか、無秩序になっているかを判断します。画像処理システムは環境を分析し、個々の部品の位置を認識する必要があります。それが可能となるためには、あらかじめ部品を定義し、照明条件などの値をCADデータでシステムに取り込んでおく必要があります。
第2ステップで、画像処理システムからロボットコントローラーにデータを送信。このコントローラが、最適なロボット経路や把持・取出し戦略の計画を担当。ここでは、大きな目標が設定されています。ボックスの中を完全に空にして、あらゆるワークを把持できること、すなわちピッキングです。
最後に、ロボットアームはあらかじめ決められた場所に部品を置くか、さらなる処理のために下流の工作機械に直接これらの部品を挿入する必要があります。
Roboceptionのインテリジェントカメラから、MAFU Automationの3Dセンサーまで。私たちは、Bin Pickingで貴社の柔軟性・効率性、従業員の安心感を最大化するための多種多様なモジュール式ソリューションを取り揃えています。そのため、お客様がこれらのメリットを享受できるよう、効果的かつ円滑な移行に必要なコンポーネントをソリューションに装備します。
ボックスからの部品の自動取出しは、バルク材を多く扱う産業で高い応用力を発揮します。コンテナ内の商品はバラバラの状態や未選別状態であるため、3D画像処理システムとハンドリング用の産業用ロボットを組み合わせて使用しています。これにより、あらゆる種類のバルク材の自動ハンドリングが可能になります。画像処理システムと産業用ロボットの組み合わせは、多くのメリットをもたらします。このメリットを最大化することが私たちの目標です。
KUKAは、お客様それぞれのご要望や適用分野に合わせて、様々な可搬質量やリーチを持つ 産業用ロボットを幅広く取り揃えています。