Bin Picking -「盒中抓取」
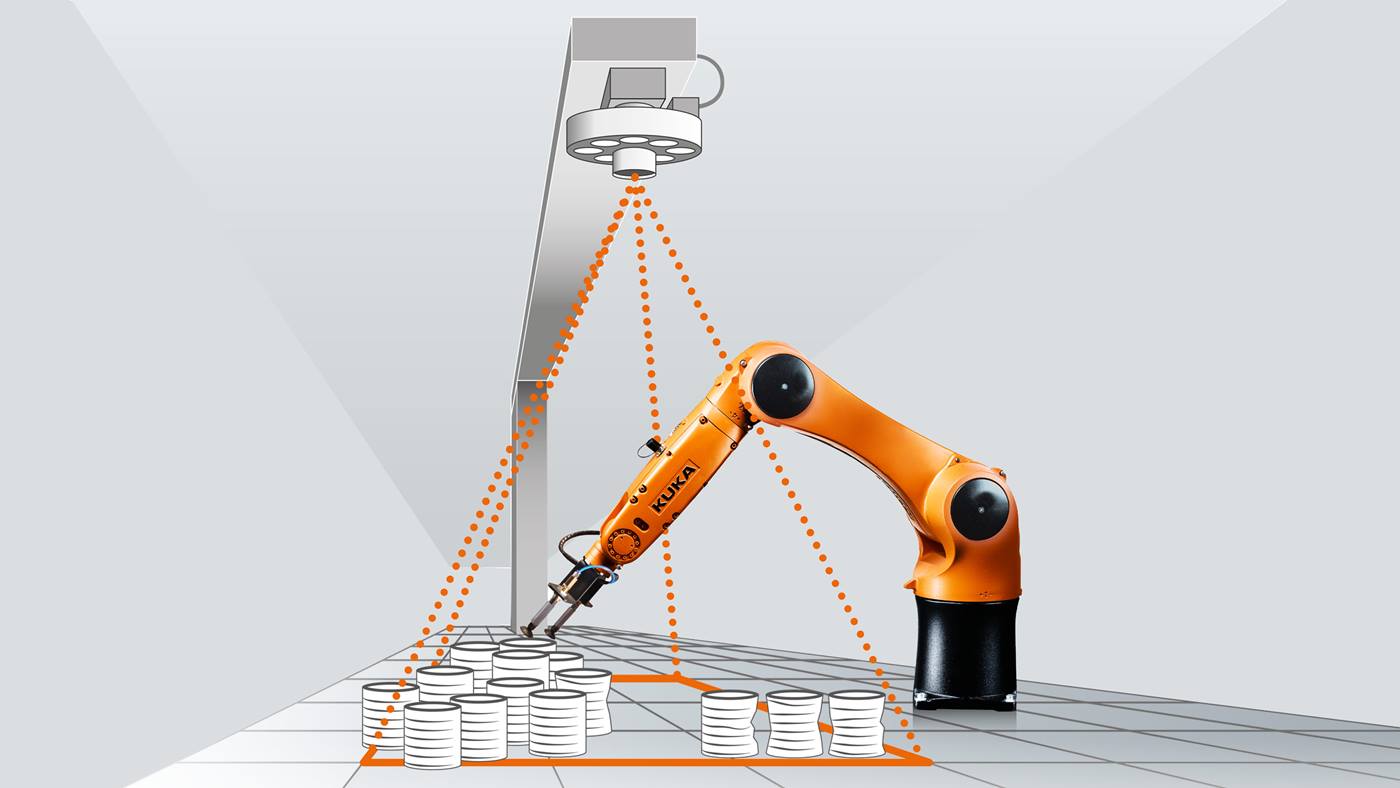
工業型機械手臂最常見的任務是將組件從甲地裝載或運輸到乙地。製造業的需求和複雜性日益增長,要求工業型機械手臂除了簡單的裝卸任務之外,還必須能夠快速偵測到零件並辨識種類。這就是容器零件抓取技術——Bin Picking——發揮作用的地方。Bin Picking 的意思是「盒中抓取」,分三個步驟進行,首先需辨識隨機排列的物體,將其拿起,然後重新放置。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果

該技術的目地在於自動辨識料箱裡的物件,並且正確抓住並取出。其中所面臨的挑戰是,在大多數情況下,物件通常未分類地混亂排列。KUKA 可針對此類應用根據客戶需求提供完整的解決方案。
工業型機械手臂最常見的任務是將組件從甲地裝載或運輸到乙地。製造業的需求和複雜性日益增長,要求工業型機械手臂除了簡單的裝卸任務之外,還必須能夠快速偵測到零件並辨識種類。這就是容器零件抓取技術——Bin Picking——發揮作用的地方。Bin Picking 的意思是「盒中抓取」,分三個步驟進行,首先需辨識隨機排列的物體,將其拿起,然後重新放置。
第一個步驟是確定零件是否已分類排列、半分類排列或混亂放置。影像處理系統必須分析環境,並確認各個零件的位置。為此,必須事先定義組件,並且以 CAD 格式將例如照明條件等參數匯入系統。
在第二個步驟中,來自影像處理系統的數據會被傳輸到機器人控制器。控制器將規劃出最理想的機器人軌跡和抓取策略。此處的主要目標是:完全清空料盒,抓取所有工件,也就是所謂的 Picking。
最後,機械臂會將零件放置在預定義的點,或是將零件直接放入下游工具機以進行進一步加工。
從 Roboception 智慧型攝影機到 MAFU Automation 的 3D 感測器:我們提供各種模組化解決方案,協助您打造最合適的零件抓取系統,替您的公司有效地提高靈活性、盈利能力和減輕員工負擔。我們為抓取系統配備必要組件,以確保在過渡時期也能實現高效平穩作業,讓您從中獲益。
在必須處理大量散裝材料的行業中,從料箱內自動抓取零件的功能廣泛受到應用。由於料箱裡的產品經常是散裝或未分類,因此在搬運處理產品時,會將 3D 影像處理系統與工業型機械手臂結合使用。如此便能夠自動化處理各種散裝物料。影像處理系統和工業型機械手臂的結合帶來眾多優勢。而我們的目標就是將這些優勢發揮到極致。
KUKA 提供種類廣泛的工業型機械手臂,具有不同的負載能力和作用範圍,可滿足您的個別具體要求和應用領域。