소프트웨어의 운전 원리
로봇 컨트롤러의 설정 기기는 최저 기준 파라미터 세트의 사용 하에 명령된 움직임에 따라 해당하는 위치 정보를 얻습니다.
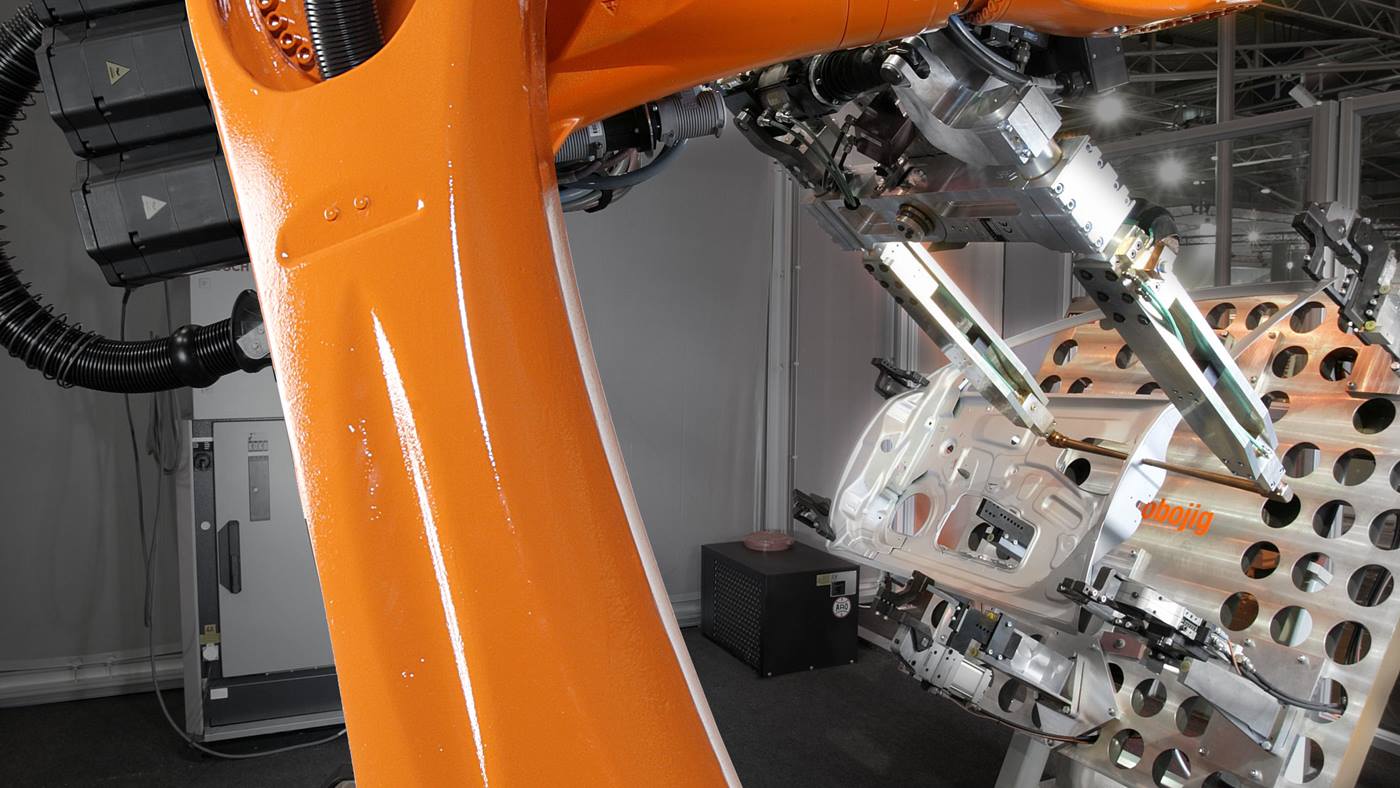
서보 건이 움직이는 도중 부품과 닿는 즉시, 로봇은 멈추게 됩니다. 위치 편차가 더 커지면 로봇은 용접건을 폐쇄하며 해당하는 위치로 옮겨집니다.
조정 작업은 일반적으로 +/- 1,5 밀리미터의 간격을 가지며, 이를 통해 전극 팁의 마모 및 용접건 팔의 굽힘이 보완됩니다.
현재 이전 브라우저 버전의 Internet Explorer를 사용하고 계십니다.
최적화된 보기를 위해 브라우저를 업데이트해 주십시오.

KUKA 소프트웨어인 KUKA.EqualizingTech은 기술 서비스 패키지인 ServoGun의 추가 옵션입니다. 이를 통해 로봇의 움직임으로 서보 점용접 건의 위치 조정이 가능해집니다. 소프트웨어로 인해 추가적인 용접건 조정 시스템은 필요하지 않게 됩니다.
KUKA.Equalizing은 KUKA.ServoGun의 추가 소프트웨어로, 로봇의 움직임으로 기존과 같은 용접건의 기계식 동기화 기능을 보유하는 동시에 용접건의 방향에 관계 없이 위치 조정을 가능하게 합니다. 이는 기존의 용접건 중력 조정 시스템을 보유한 고객에게 큰 이점을 제공합니다.
KUKA.Equalizing은 로봇의 움직임으로 용접건이 상대적으로 부품의 위치에 맞게 위치 조정 될 수 있도록 보장합니다. 이를 통해 전극 팁의 소모, 소재 위치 편차 또는 용접건의 팔이 굽혀짐으로 나타나는 위치 편차 또한 로봇의 움직임으로 보상될 수 있습니다. KUKA.EqualizingTech의 위치조정은 가공재에 남는 잔존강도를 감소시킵니다.
로봇 컨트롤러의 설정 기기는 최저 기준 파라미터 세트의 사용 하에 명령된 움직임에 따라 해당하는 위치 정보를 얻습니다.
서보 건이 움직이는 도중 부품과 닿는 즉시, 로봇은 멈추게 됩니다. 위치 편차가 더 커지면 로봇은 용접건을 폐쇄하며 해당하는 위치로 옮겨집니다.
조정 작업은 일반적으로 +/- 1,5 밀리미터의 간격을 가지며, 이를 통해 전극 팁의 마모 및 용접건 팔의 굽힘이 보완됩니다.
공기식 조정 시스템에 필수적인 복잡한 시운전은 이 애플리케이션 소프트웨어의 설치로 생략될 수 있습니다. 조정 시스템에서 기존 부품 중 하나가 누락될 경우에도 KUKA.EqualizingTech를 통해 투자 비용을 절약하고 유지보수비용도 감축시킬 수 있습니다.
리니어 베어링, 지지용 콘솔이나 밸브, 감압 장치, 파이프와 같은 추가 요소들은 KUKA.EqualizingTech 소프트웨어를 사용한다면 불필요해집니다. 센서 및 전기 컨트롤러나 압축 공기 기반시설 또한 생략 가능합니다.
KUKA.EqualizingTech의 도입으로 전체 중량을 대폭 축소할 수 있습니다. 중량은 기존의 점용접 건에 비해 최대 20% 감소합니다.